Pourquoi? pour pouvoir continuer le projet FPV avec.
Donc changement des moteurs, donc de Variateur (flashé Simonk spécial galette), changmement de recepteur (Du futaba pour pouvoir profiter du Fail save)
passage a des helices Graupner E-prop 11×5
Essai d’accus de plus grosse capacité: A-Spec 4500.
Rabbit ne développe plus de firmware pour la version 1 de cette carte.
Malgré mes sollicitations pour tester la version 2 et leurs faire une notice en Français, Pas de réponse, dommage… je teste dorénavant une carte multiWII (Je verrais si je fais une doc Frenchie ).
Je laisse ici les versions des firmwares en téléchargement:
Si la carte est mal auto-testé, le gyro est désactiver (phase plus longue qu’avant). Respectez la procédure:
1. connectez le multi-rotor
2. Laisser-le stable et assurer qu’il ne bouge pas
3. Déplacer le manche de votre émetteur pour commencer la phase d’auto-teste (d’abord un BIP)
4. Attendre patiemment que l’auto-teste soit finit. (un autre BIP)
Lfhm_Tools_v1.207.zip (Peu d’amélioration visible, pas de régression sur cette release)
– Alerte de basse tension.
– Décollage / Atterrissage Automatique.
– Trois modes vol. (Normal, Altittude, GPS).
– Verrouillage de cible pour le suivi (follow me), et vol en cercle.
– Auto-navigation par Way-points
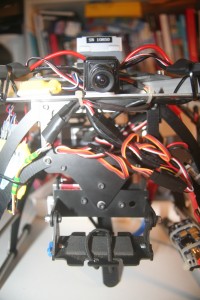
Lundi j’ai testé dans le vent (l’histoire me dira que l’idée n’était pas bonne) le « GO at home » de mon quadri-rotor, équipé de la carte RABBIT du sonar/Baro et du GPS.
Les premiers essais se font vite fait, hop activation de la fonction position hold sur la position de départ, petit vol, je m’éloigne sans prendre de hauteur, puis activation de la fonction GO + atterrissage. Pas de soucis tout se passe comme je le souhaite, la machine revient à peu près à son lieu de décollage, puis entame l’attero . Ok pour moi ça fonctionne.
Puis le vent forcit, je prends de l’attitude, je m’éloigne , activation GO . Mais le vent le perturbe ne le laisse pas redescendre, il me dépasse, se dirige vers les voitures…. je baisse de moi même les gazes… le vent forcit encore, bon je coupe les gazes à 4 m d’altitude, il descend enfin lourdement dans l’herbe.
Les Jivaros étaient des réducteurs de tête, ici ce sera un hexa réduit. En plus, dans Jivaro, il y a Ro pour rotor… Reste à trouver à quoi pourrait correspondre JIVA?
L’idée, réaliser un hexa-rotor de moins de 21 cm d’entre axe moteur est arrivé par ma femme lors d’une course de miniZ.
Pourquoi tu ne ferais pas un multi-rotor à cette échelle?
La suite, on s’en doute, mettre en œuvre l’idée…
Le projet est mise en œuvre grâce à la société DiaLFonZo-Copter.com, qui a réaliser le châssis à partir de mes idées papier.
Mon cahier des charges:
Utilisation de carte de contrôle de taille standard (ce sera une RABBIT)
Réutilisation de batterie LiPo 2s 800mAh
Une masse total de 250g
Micro BL de 10g et micro variateur (ESC) de 6g.
Tous est arrivé, les ESC, les moteurs, c’est vraiment trés petit.
L’equipement:
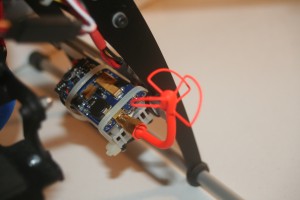
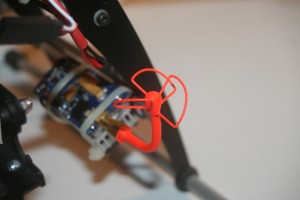
Les moteurs: 6 x 1811-2000
Kv: 2000rpm/v
Weight: 10g (With wires and mount)
Suggested Prop: 7×5
Suggested Power: 7.4v
No Load Current: .4a
Thrust: 130g / 5000rpm
7.4v no-load speed: 15000rpm
Peak Eff Current: 5.5A
Shaft: 2mm
Diameter: 18mm
Length: 30mm (including mount & shaft
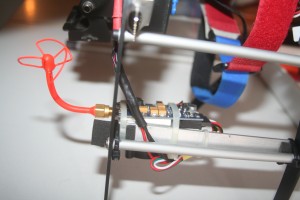
Les Variateurs: 6 x Plush 6amp Brushless Speed Controller
Model: Plush 6A
Continuous Current: 6A
Burst: 8A
BEC: Linear
BEC Output: 5v/.8A
Lipo Count: 2cell Guarenteed (3 cell capable but not warranted)
NiMH: 5-6
Programability: Programming card or Radio Controller
Weight: 6g
Size: 24x12x6mm
Hélices :
92mm x 3 pales
Hub 1.9mm
Soucis Actuel: il pèse 350g, soit plus de 100 g de plus que prévu…
Résultat: il est trop lourd.
Solution envisagé: Lui faire perdre du poids, trouver des hélices avec plus de pas, mettre un accu en 11,1v.
La solution trouvé: passer en 3s, ca vole voici la video ci dessous
Je viens de recevoir cette carte: RABBIT Flight Controller
Son prix d’environ 70€ de base.
La Rabbit possède un gyroscope de trois-axes, un accéléromètre de trois-axes, le tous géré par un contrôleur 32 bit, un capteur de tension accus LiPo (jusque 4S).
De nombreuses options peuvent y être ajoutées, comme un capteur de pression (pour l’altitude), un capteur Ultrason: Ultrasonic Module HC-SR04 moins de 5 € ( pour l’altitude base <2 mètres) et d’un GPS (GPS Receiver w/ u-blox GPS module moins de 50€).
La configuration se fait via un port USB, mais permet également d’effectuer les mises à jour du firmware.
Première conclusion: super, encore des réglages à effectuer.
En commande le GPS… qui semble t’il est géré convenablement depuis le firware 1.206.
Je viens de tester la fonction auto landing (pose automatique) vraiment très surprenant, le quadri baisse les gazes progressivement, détecte le sol (grâce au sonar) ce pose puis coupe les gazes.
Il faut pour repartir désactiver la fonction, réarmer la carte, et ca repart.
Pour la machine volante d’un amis, j’ai monté cette carte sur sa config.
Le prix est très intéressant (-de 40€)
La carte est monté avec 3 gyro et 3 accéléromètres, ce qui lui confère une stabilité de base formidable.
Elle intègre une alarme sonore pour la tension basse.
On peut la paramétrer via un PC.
Voici le premier vole avec:
Pour ma conclusion:
elle est très bien.
Je veux dire par la, que dés sa première mise en marche elle joue sont rôle, elle est upgradable via un PC. Que demander de plus?














")




