En faite non, il s’agit de ma plateforme de test, qui a reçu dans le passé des carte comme la Rabbit, une KK2 dernièrement une plateforme multi wii
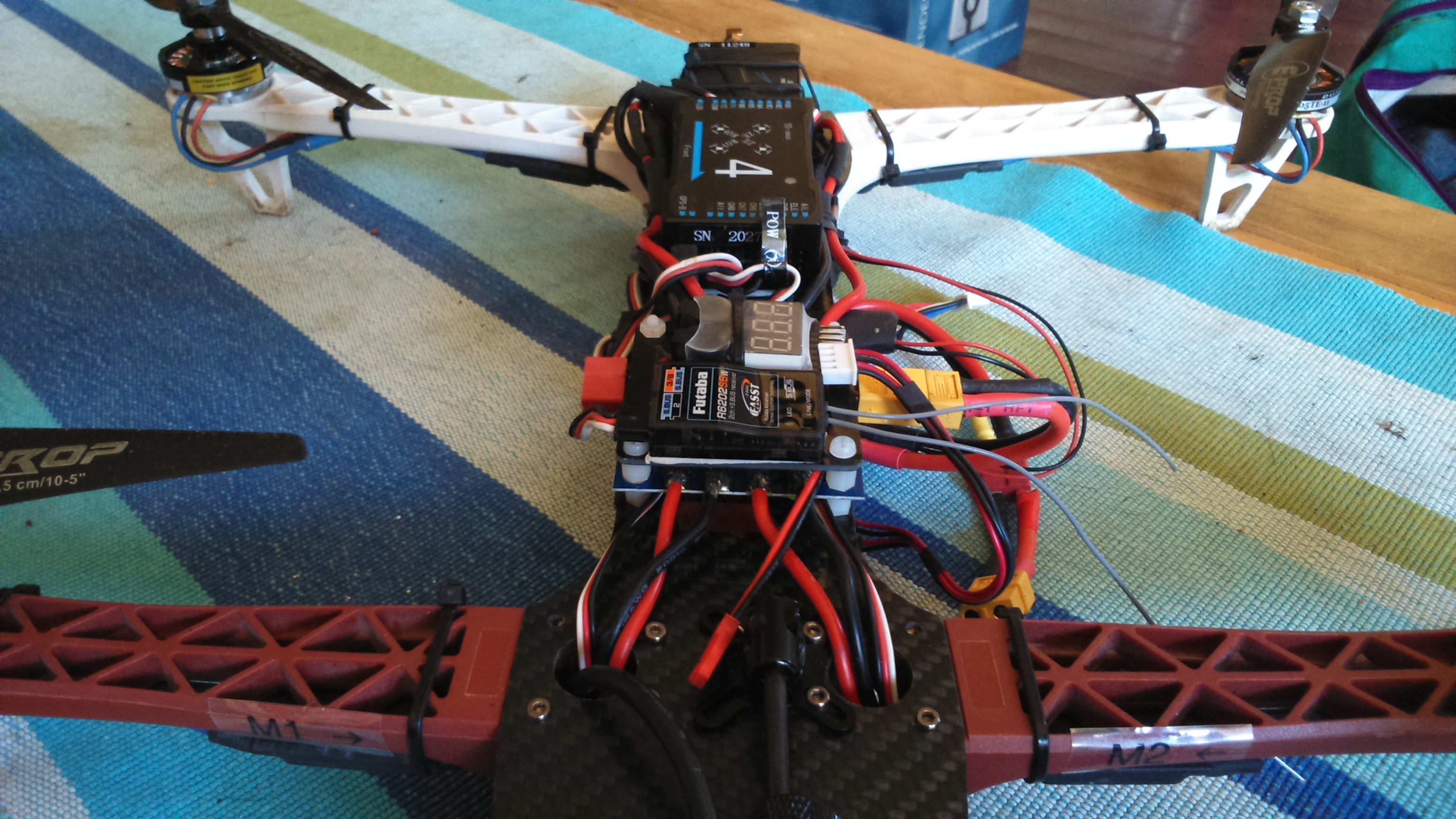
Maintenant elle est équipe de la carte Zero uav YS-X4 ( oui encore du Zéro UAV, désolé perso les solutions qui fonctionnent, les constructeurs sympa comme eux, J’aime).
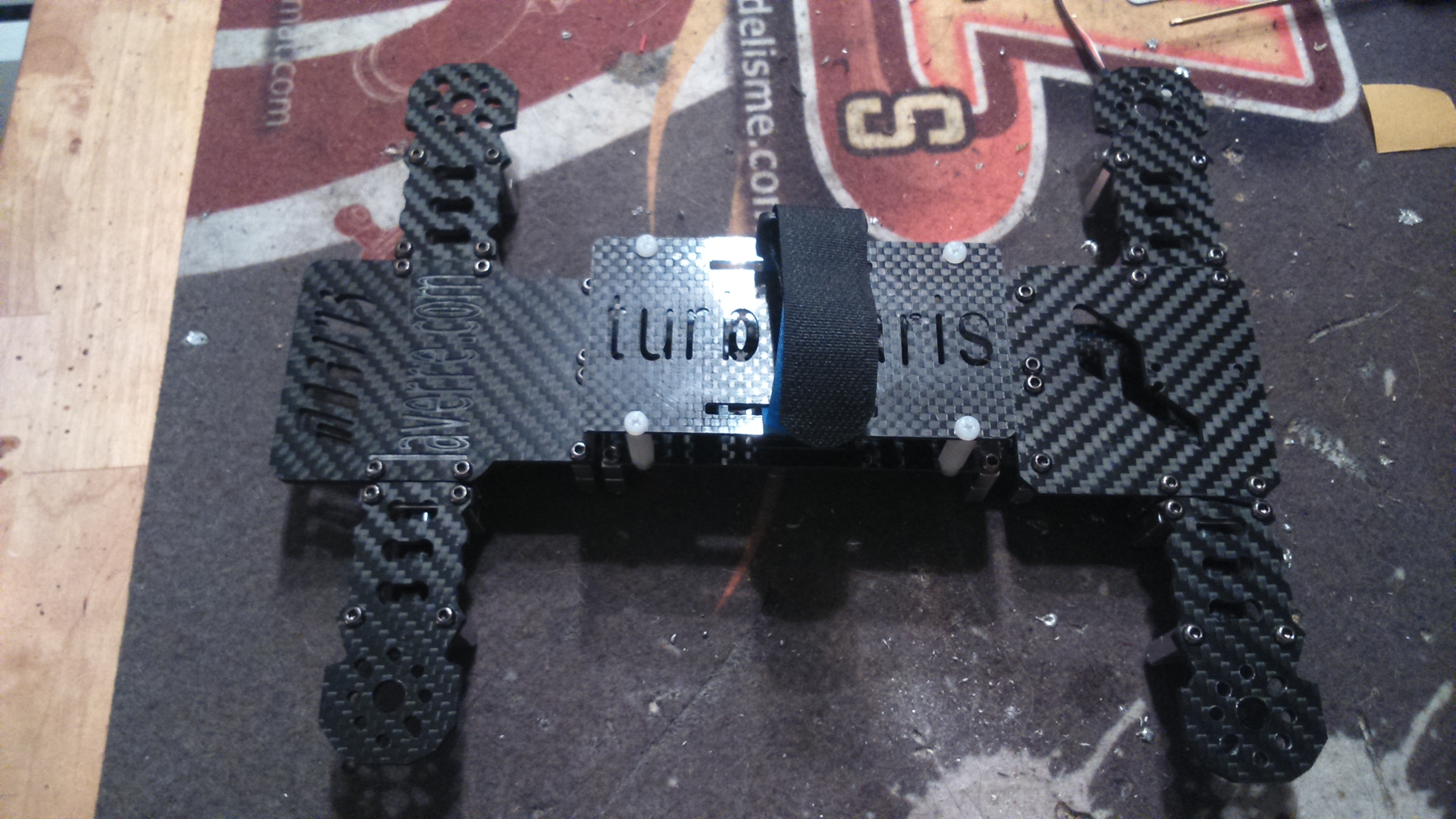
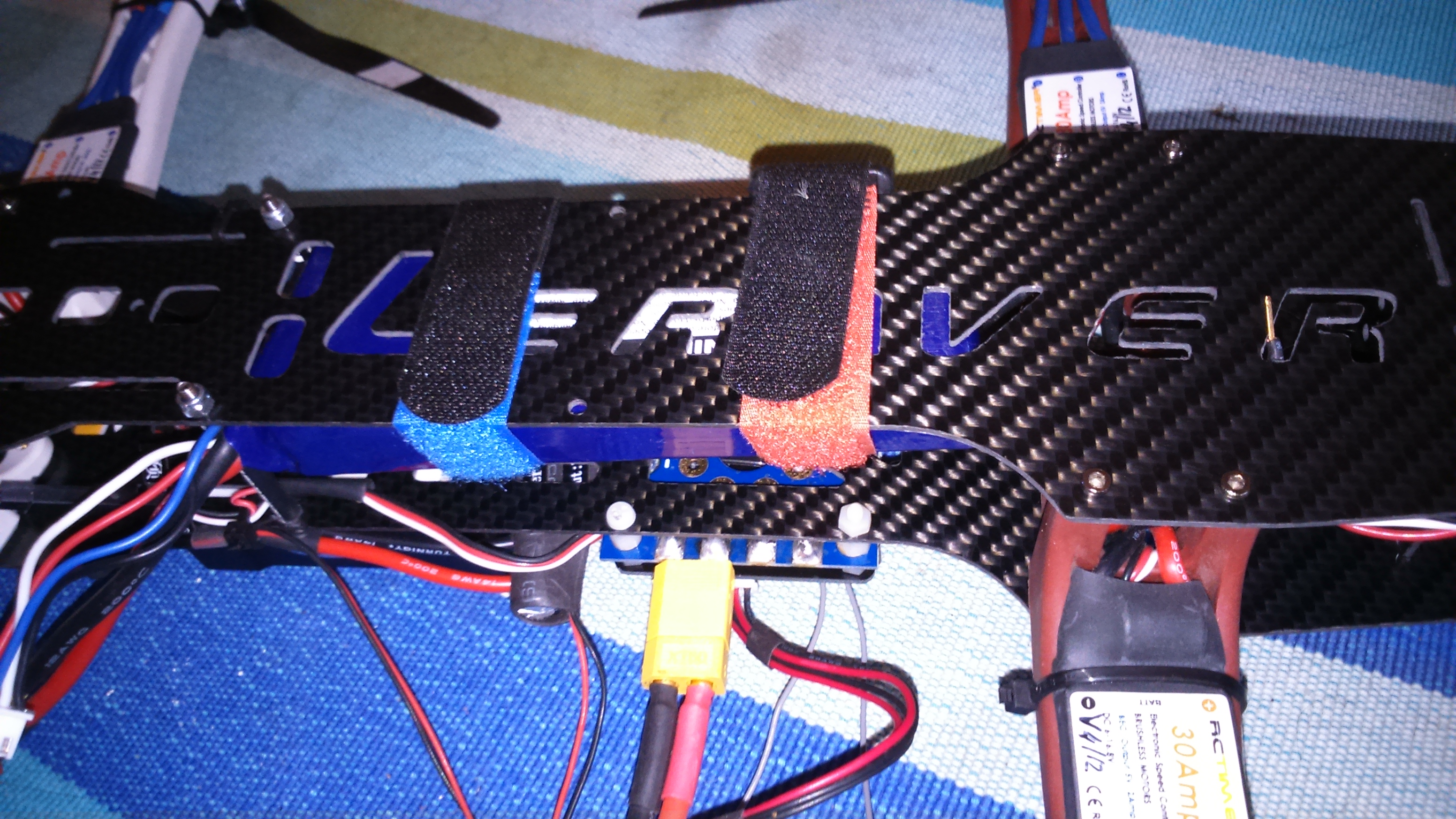
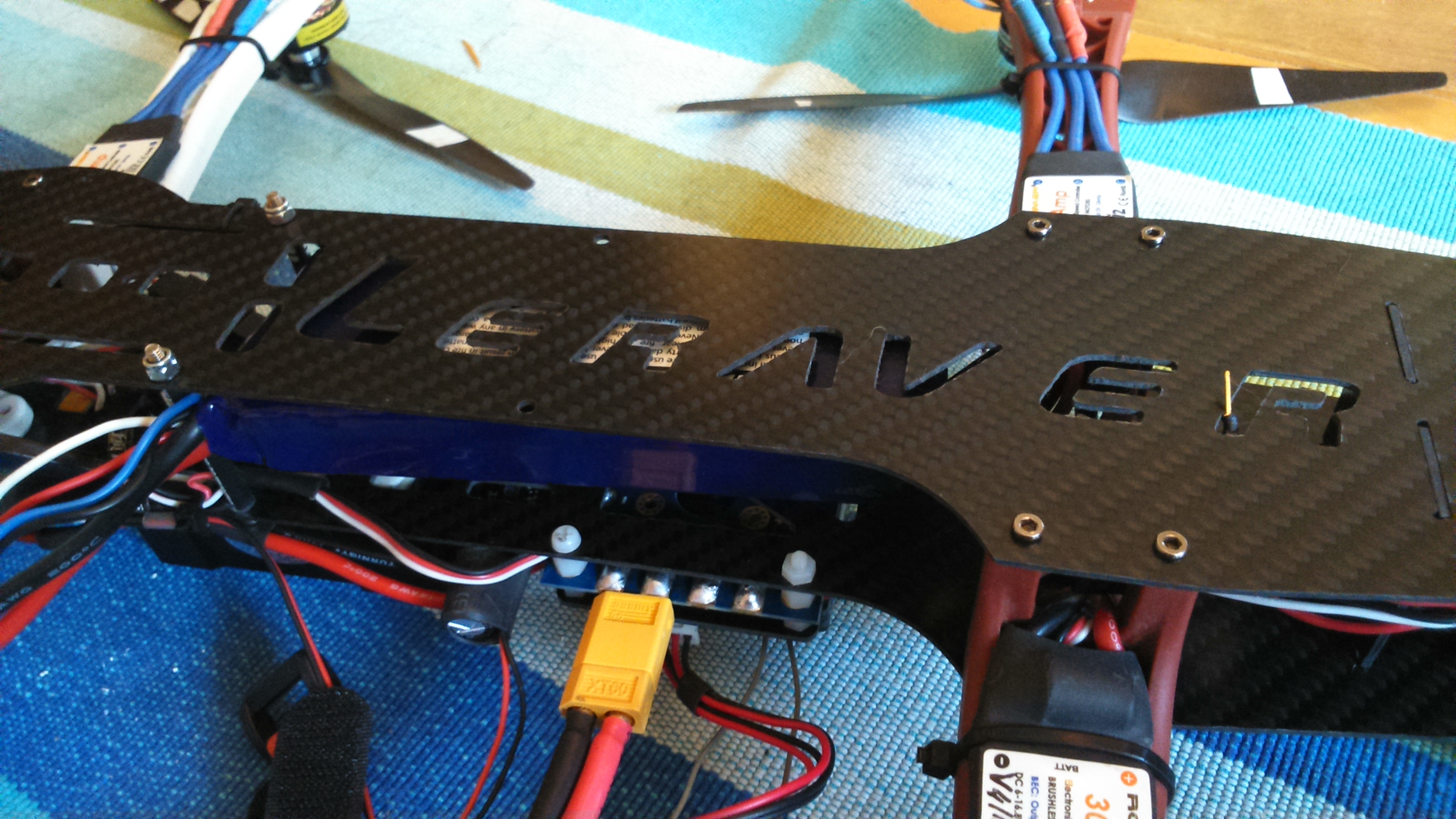
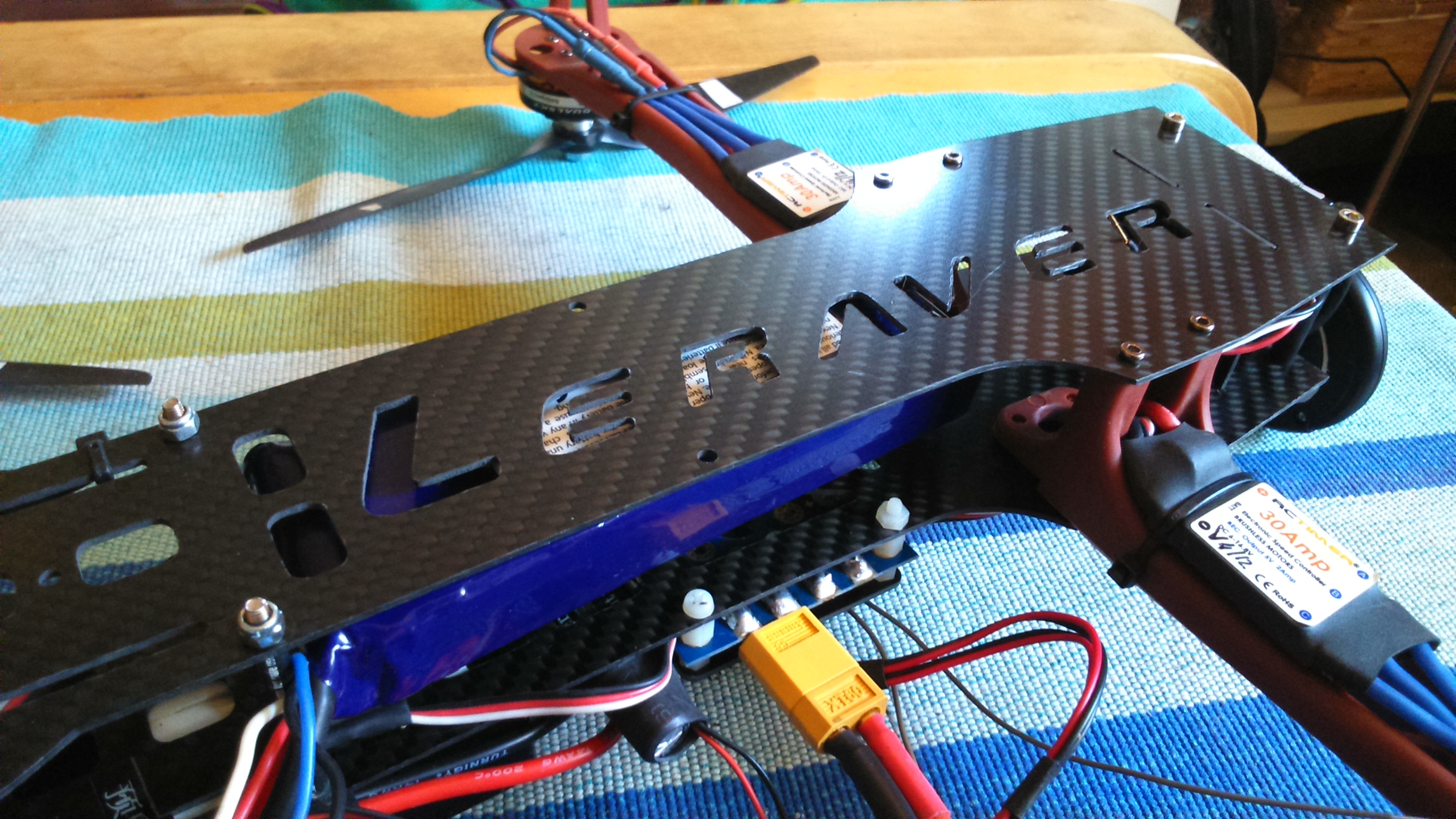
Le nouveau quadri H Leraverlaris des bras de F550 Dji ‘enfin pas tous a fais…)
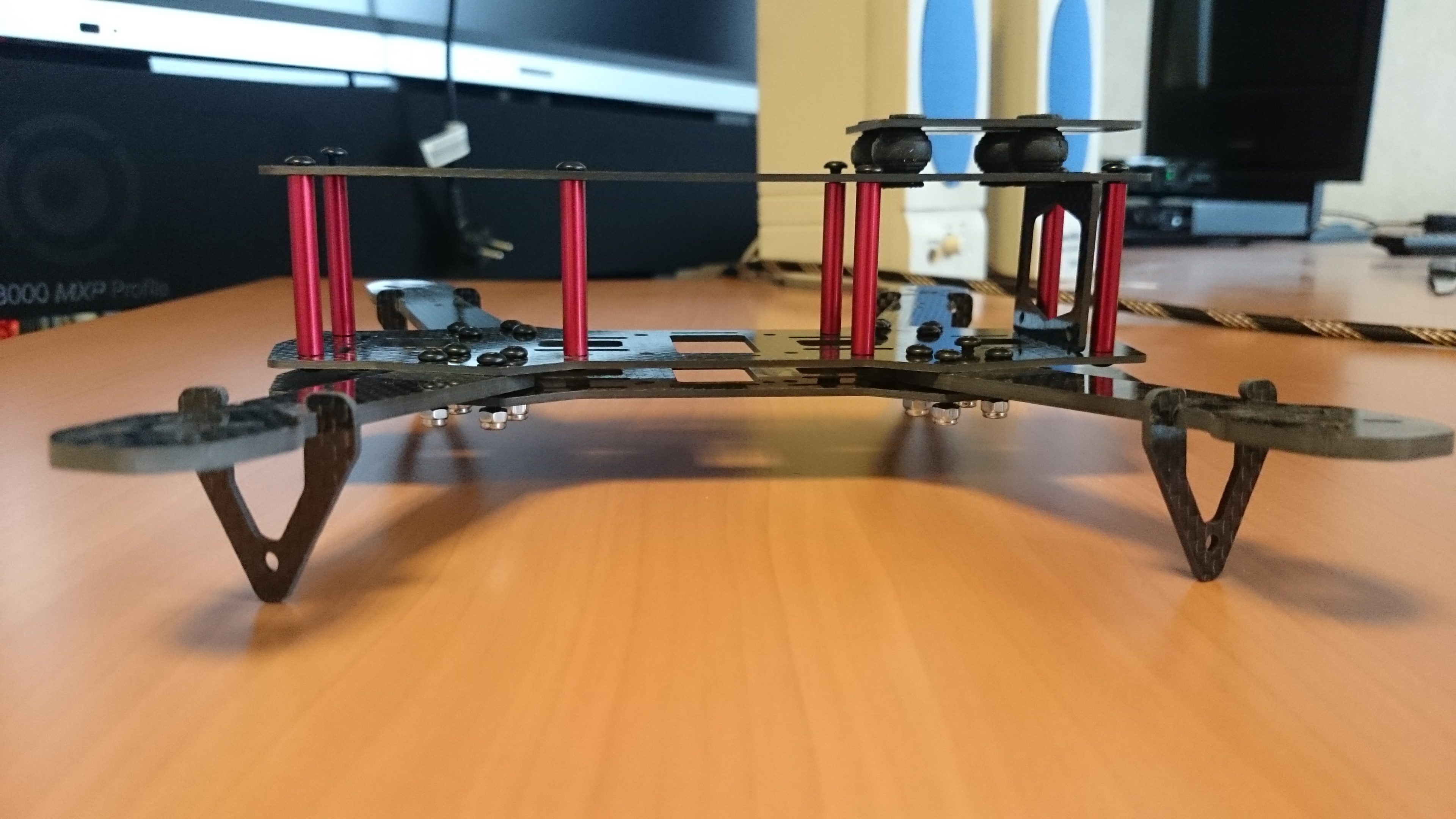
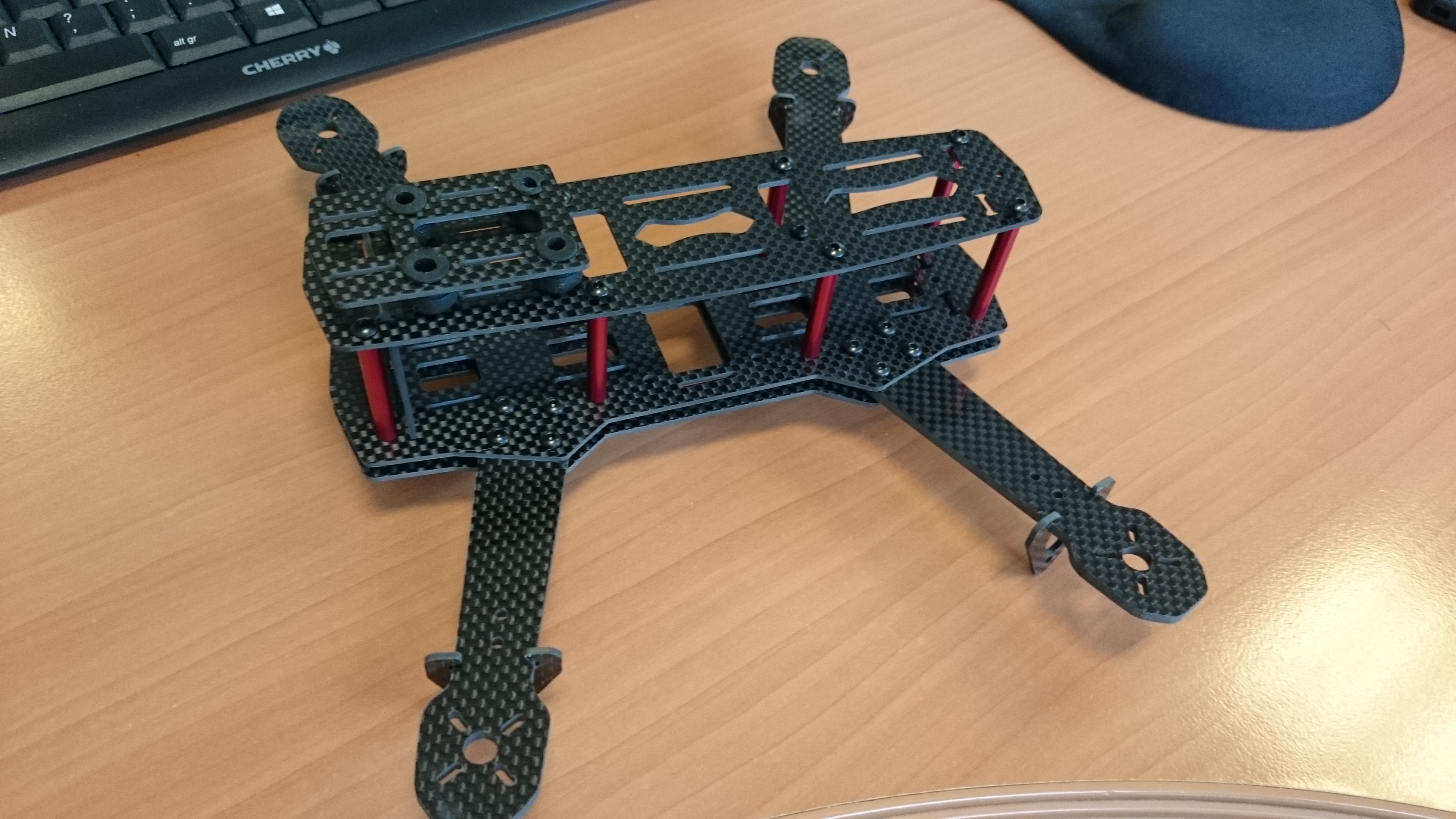
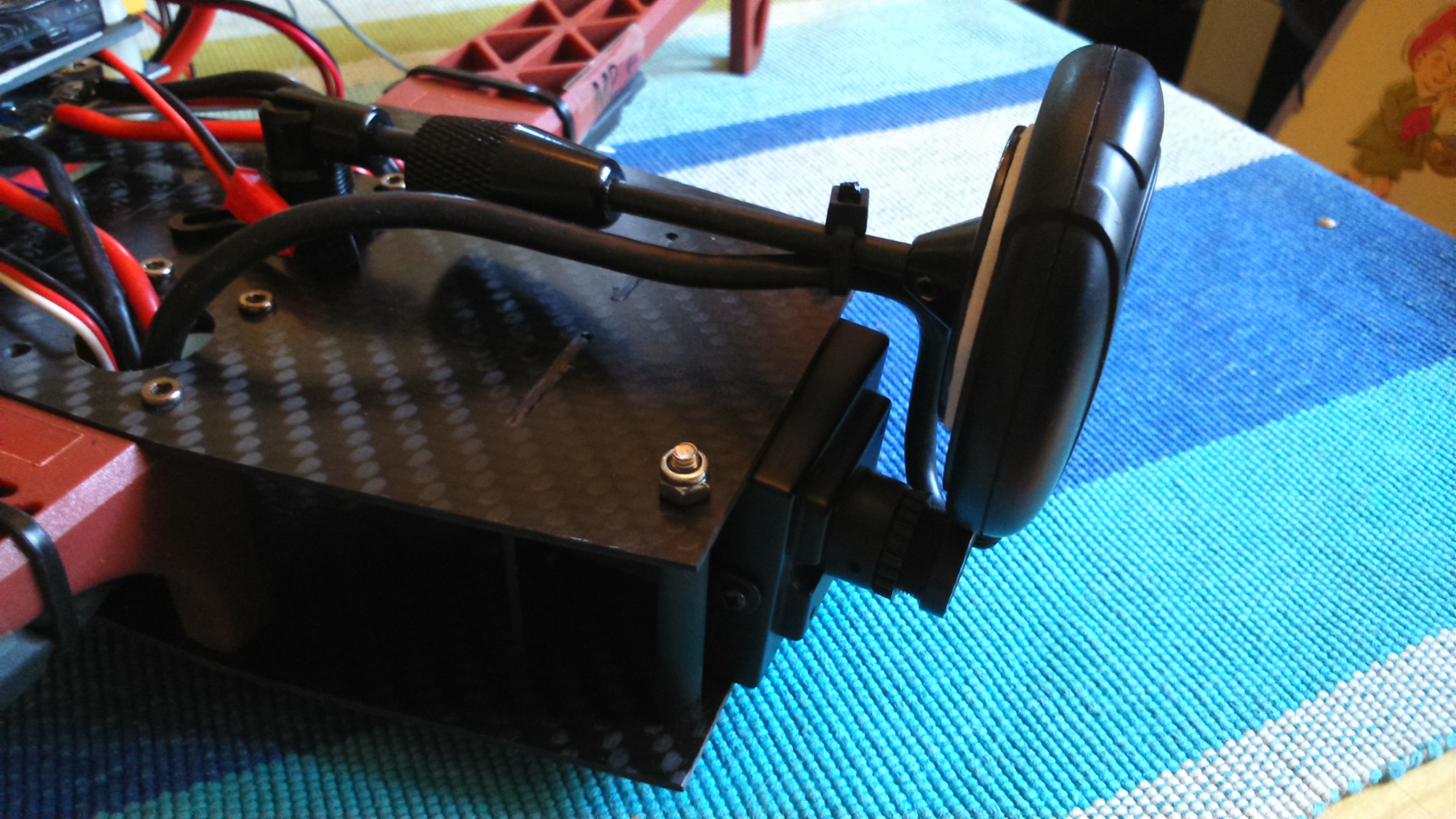
Et un châssis perso usiné par un Amis, place aux images:
Les Jivaros étaient des réducteurs de tête, ici ce sera un hexa réduit. En plus, dans Jivaro, il y a Ro pour rotor… Reste à trouver à quoi pourrait correspondre JIVA?
L’idée, réaliser un hexa-rotor de moins de 21 cm d’entre axe moteur est arrivé par ma femme lors d’une course de miniZ.
Pourquoi tu ne ferais pas un multi-rotor à cette échelle?
La suite, on s’en doute, mettre en œuvre l’idée…
Le projet est mise en œuvre grâce à la société DiaLFonZo-Copter.com, qui a réaliser le châssis à partir de mes idées papier.
Mon cahier des charges:
Utilisation de carte de contrôle de taille standard (ce sera une RABBIT)
Réutilisation de batterie LiPo 2s 800mAh
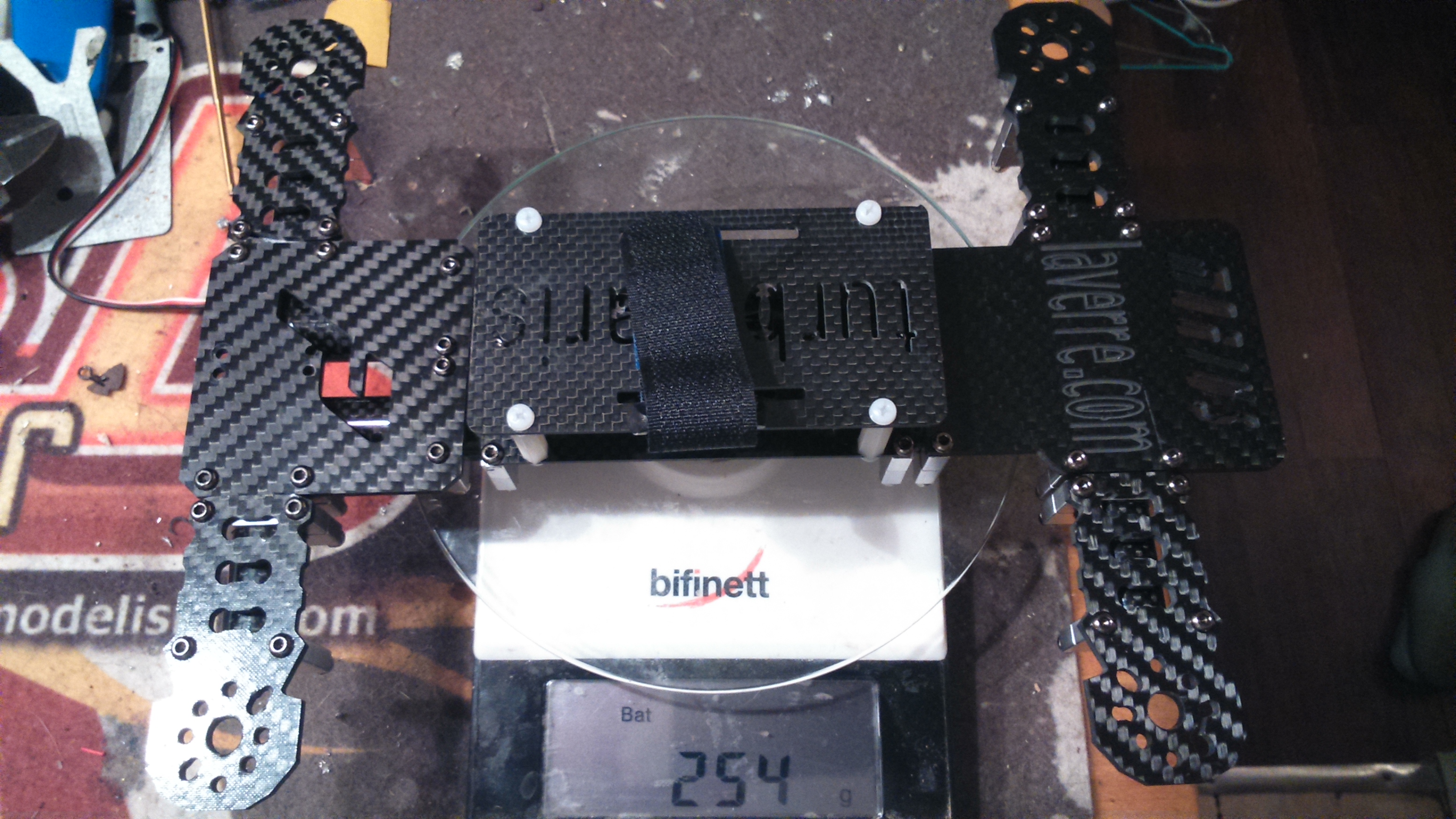
Une masse total de 250g
Micro BL de 10g et micro variateur (ESC) de 6g.
Tous est arrivé, les ESC, les moteurs, c’est vraiment trés petit.
L’equipement:
Les moteurs: 6 x 1811-2000
Kv: 2000rpm/v
Weight: 10g (With wires and mount)
Suggested Prop: 7×5
Suggested Power: 7.4v
No Load Current: .4a
Thrust: 130g / 5000rpm
7.4v no-load speed: 15000rpm
Peak Eff Current: 5.5A
Shaft: 2mm
Diameter: 18mm
Length: 30mm (including mount & shaft
Les Variateurs: 6 x Plush 6amp Brushless Speed Controller
Model: Plush 6A
Continuous Current: 6A
Burst: 8A
BEC: Linear
BEC Output: 5v/.8A
Lipo Count: 2cell Guarenteed (3 cell capable but not warranted)
NiMH: 5-6
Programability: Programming card or Radio Controller
Weight: 6g
Size: 24x12x6mm
Hélices :
92mm x 3 pales
Hub 1.9mm
Soucis Actuel: il pèse 350g, soit plus de 100 g de plus que prévu…
Résultat: il est trop lourd.
Solution envisagé: Lui faire perdre du poids, trouver des hélices avec plus de pas, mettre un accu en 11,1v.
La solution trouvé: passer en 3s, ca vole voici la video ci dessous
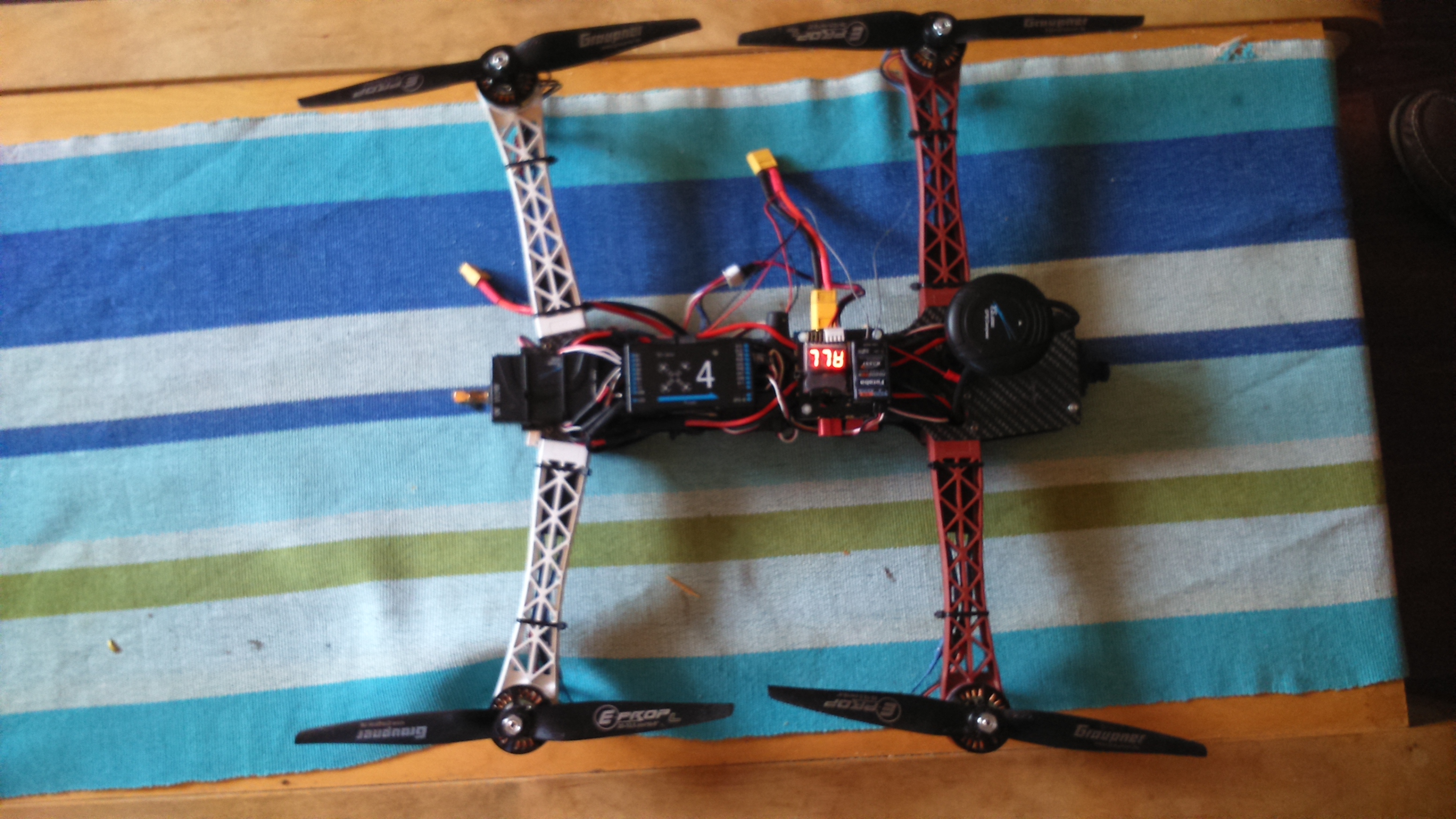
Pour la machine volante d’un amis, j’ai monté cette carte sur sa config.
Le prix est très intéressant (-de 40€)
La carte est monté avec 3 gyro et 3 accéléromètres, ce qui lui confère une stabilité de base formidable.
Elle intègre une alarme sonore pour la tension basse.
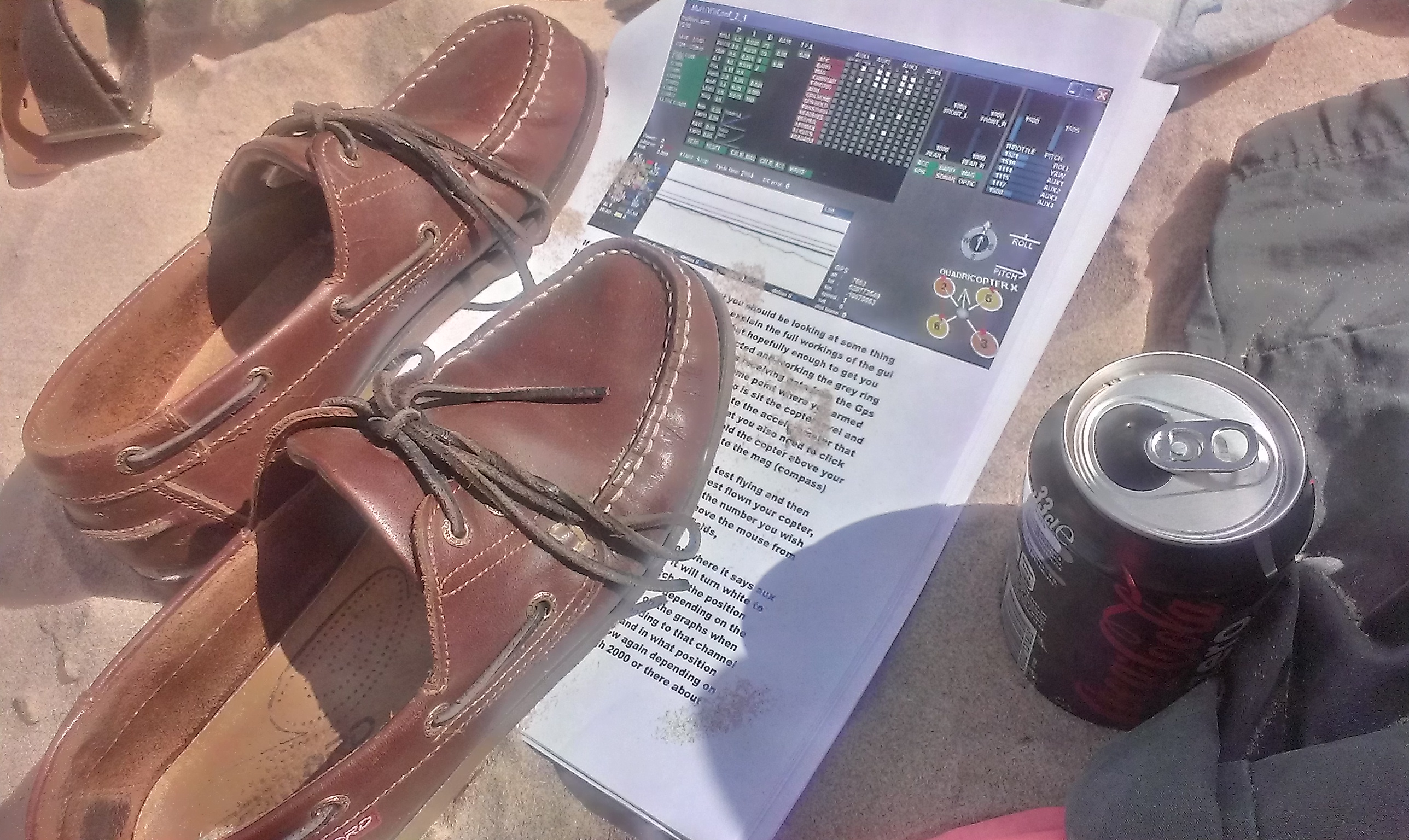
On peut la paramétrer via un PC.
Voici le premier vole avec:
Pour ma conclusion:
elle est très bien.
Je veux dire par la, que dés sa première mise en marche elle joue sont rôle, elle est upgradable via un PC. Que demander de plus?

































")



