Le châssis:
La cinématique du châssis:
Le châssis:
La cinématique du châssis:
Petite session de vol au dessus des falaises de Vattetot-sur-Mer (76).
Du plaisir à l’état pur avec l’aile Disco Parrot reconstruite à partir de pièces de récupération.
Essai vidéo 1080p, sur les falaises de Vattetot-sur-Mer (76).
Petit vol du 7 mars 2017
Le décollage:
Le vol en lui même:
Vol de samedi avec assurément un peu trop de vent pour l’aile:
Comment se passe le décollage?
Face au vent, et comme cela:
Enjoy
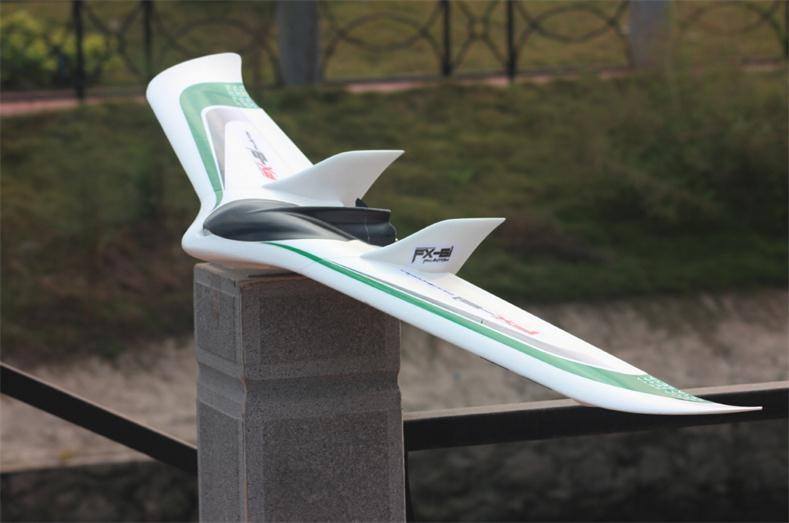
Oui, une aile à la maison, une FX-61.
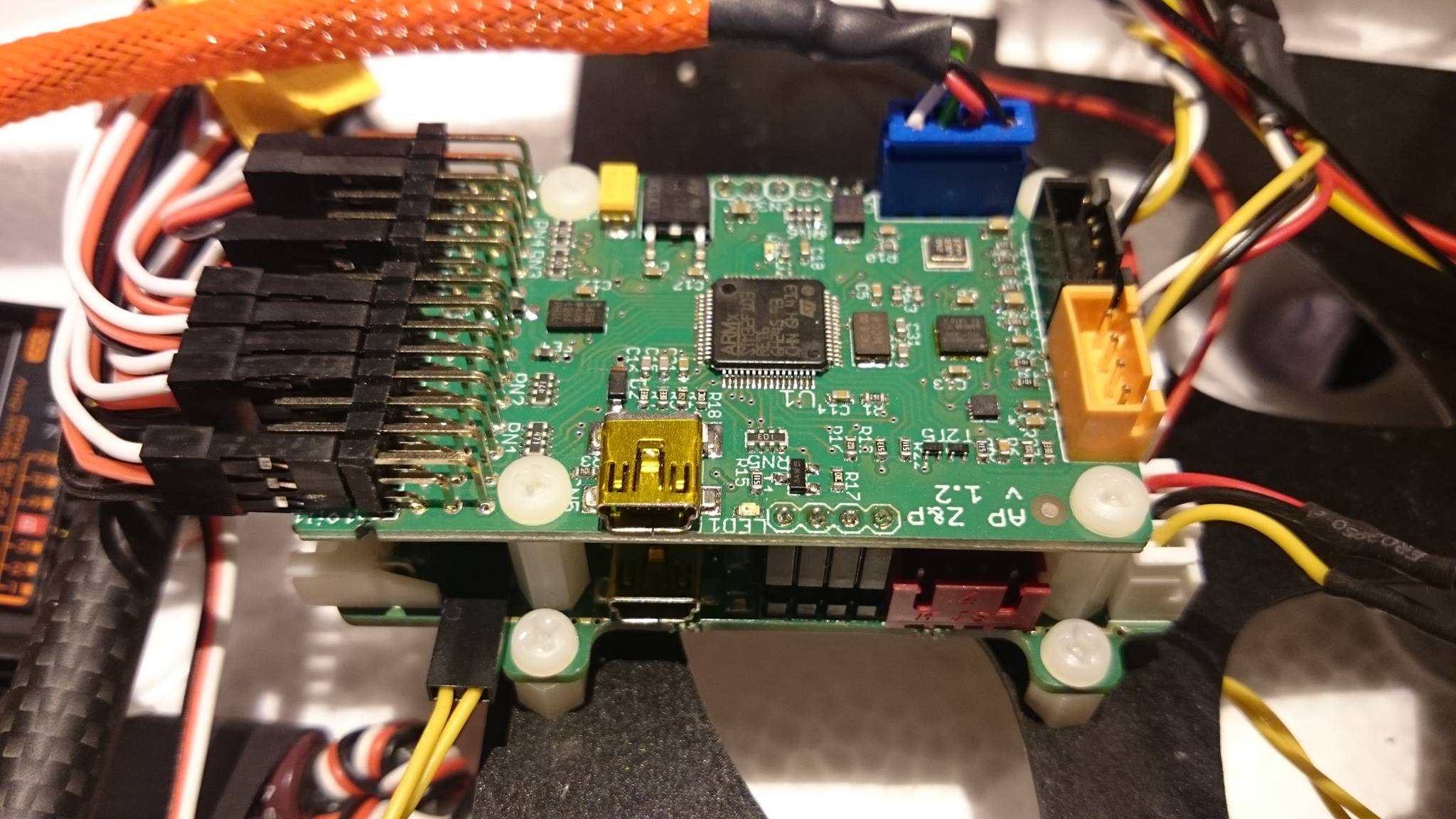
Avec mis à l’intérieur une carte de controle, et un fpv Pitlab .
Pourquoi cette marque? car il y a un système de pilotage et d’atterrissage intégré et le systeme de gps russe: le glonass
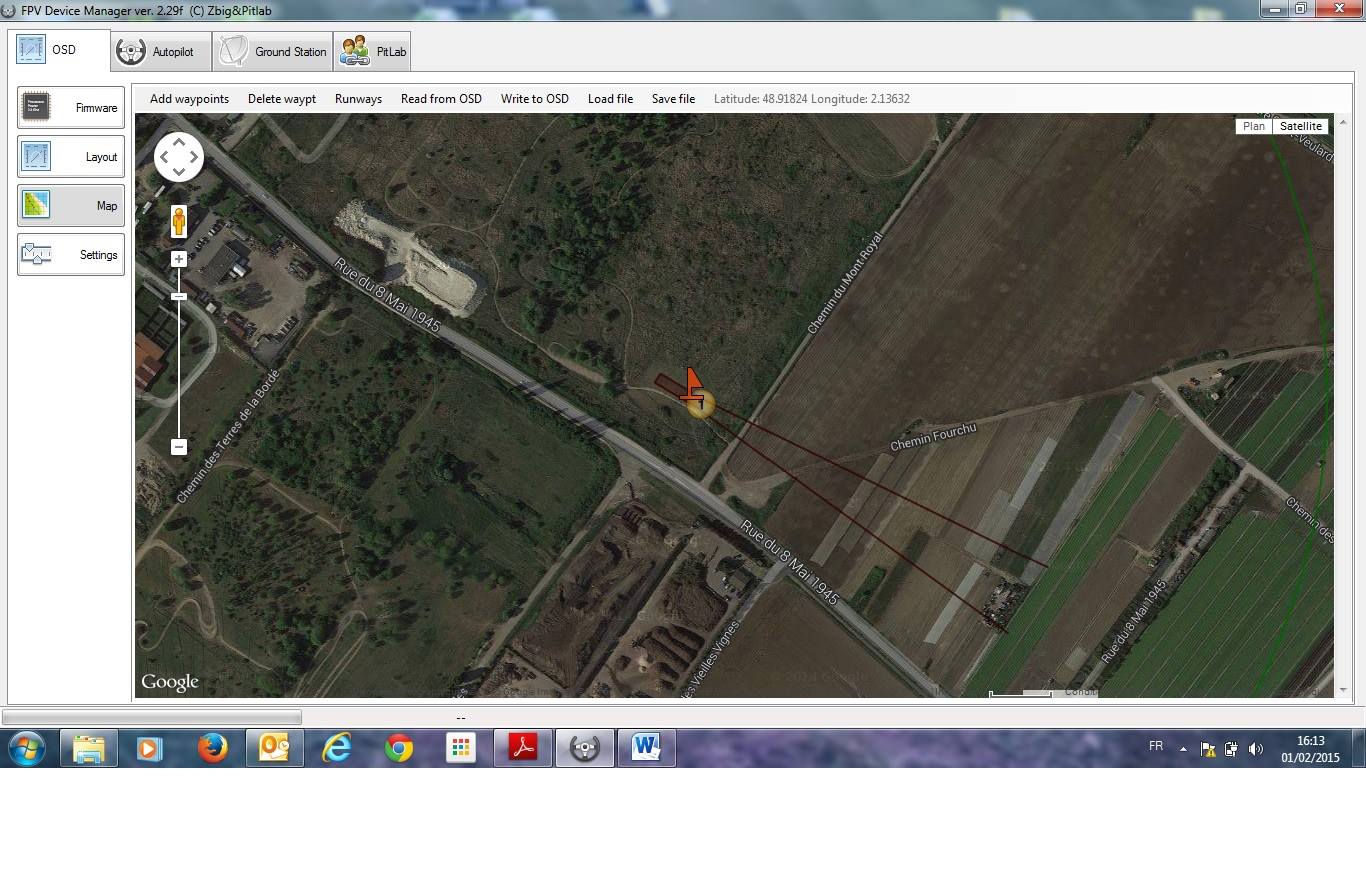
La notice en Français: Step_by_step_autopilot_setup_instructions_FR
La notice de l’ILS en anglais: ILS_in_Pitlab_OSD_en
Coté équipement RC:
Le moteur: NTM Prop Drive Series 35-30 1100kv / 380w
Les servo: Corona 939MG Metal Gear Servo 2.5kg / 0.14sec / 12.5g
L’accu: du 3s 4,5A/h
L’hélice: 9 x 6
Pour un poids de 1625g


Voila, cela commence à prendre tournure.
Il reste toutefois à trouver une solution pour annuler le jeu que j’ai sur l’un des bras.
Lorsque le montage à blanc sera fini, je ferais des photos par pièce du montage définitif, afin de faire comme une notice.





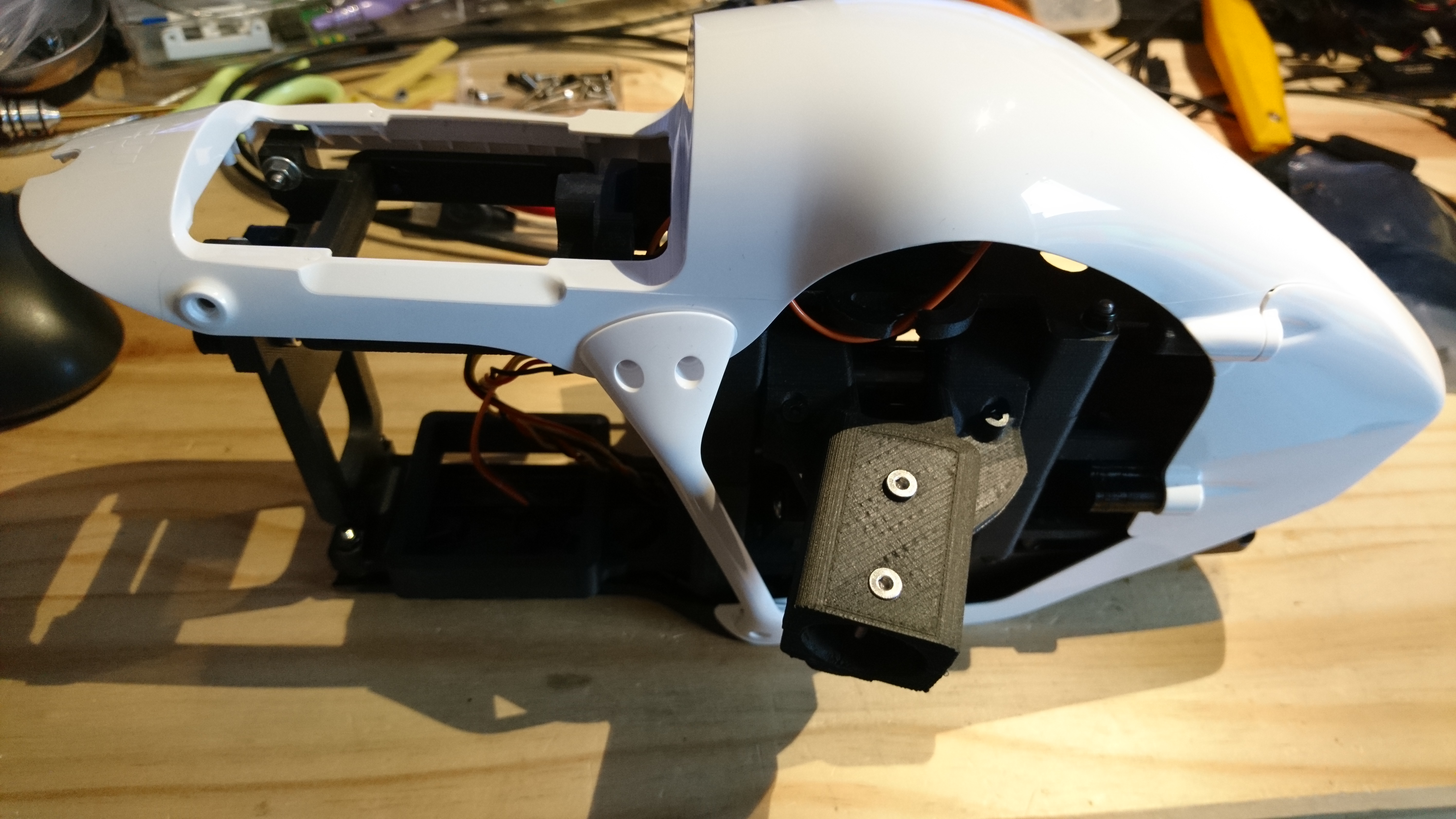
L’assemblage continue doucement et une jolie coque vient de lui être pausée.
Pour piloter le train d’atterrissage , la solution que je souhaitais était d’utiliser un servo 360° que j’ai dans un coin, et des fins de course (haut et bas) afin de rendre le tout le plus facile à dépanner.
L’utilisation d’un arduino nano me semblait une évidence vu le coup faible du produit( Banggood ici ).
Un fin de course haut, un bas afin de piloter l’arrêt du servo, le dessin est clair dans ma tête, mais ne maitrisant pas la programmation…
je me suis mis en tête de trouver un code sur le web.
Les bibliothèques sont disponible sur le web, et l’utilisation du logiciel Arduino plus ancien ( 1.0.5-r2) a été nécessaire pour pour faire tourner le sketch .
Voici une évolution grâce à Fred qui a réalisé le code arduino:
L’utilisation du capteur ultrason. Lorsque le switch 3 position de la radio sera sur la position centre, rend le système automatique. Si machine au dessus de 2m alors on monte le train, si la machine est en dessous de 2m on baisse le train. Et toujours la possibilité de forcer le système par la mise en position du switch en position haute ou basse.
Le fichier ino que j’utiliserais: train-rentrant.ino
Et ci dessous le dessin de câblage
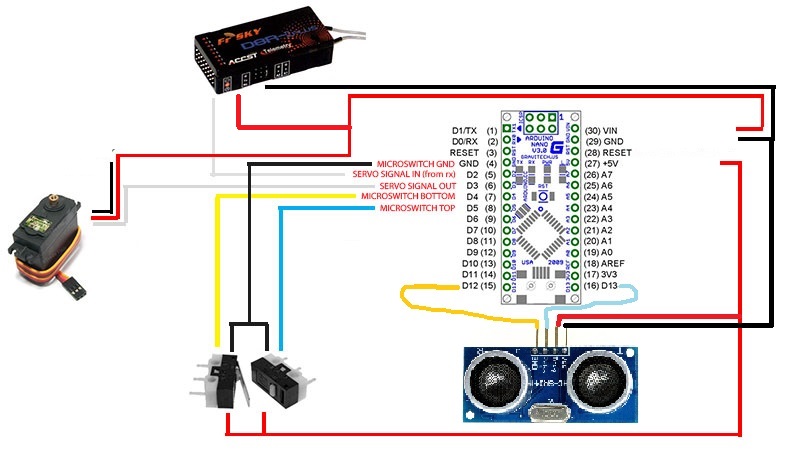
—Pour le moment—
Pour le moment je fonctionne plus ou moins (car j’ai un soucis de servo) sans le système à ultrason et avec un câblage un peu différent:
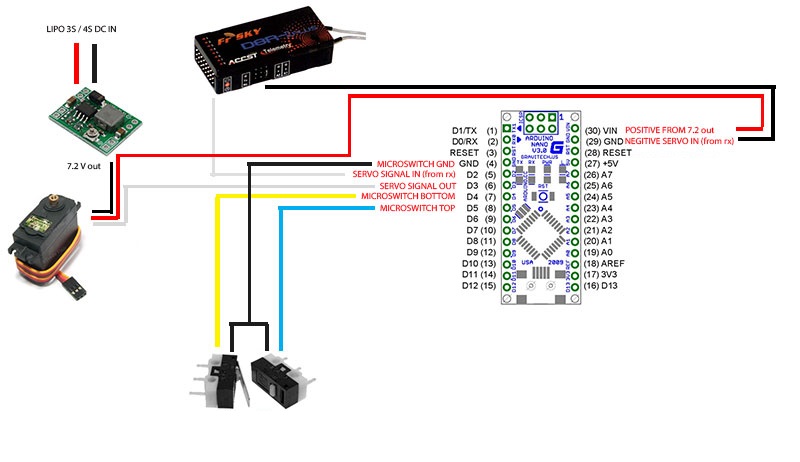 et avec ce code que je doit nettoyer …
et avec ce code que je doit nettoyer …
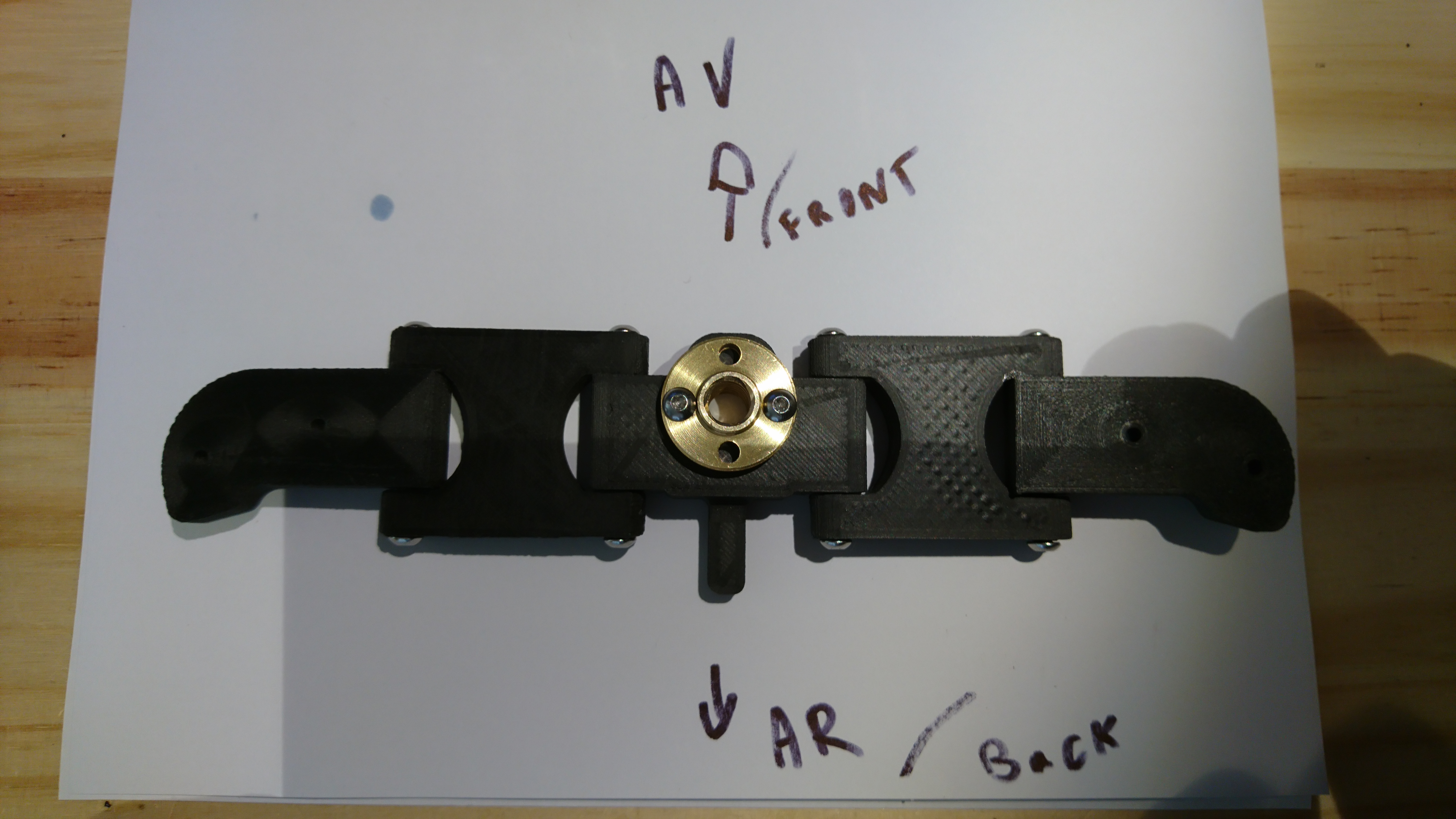
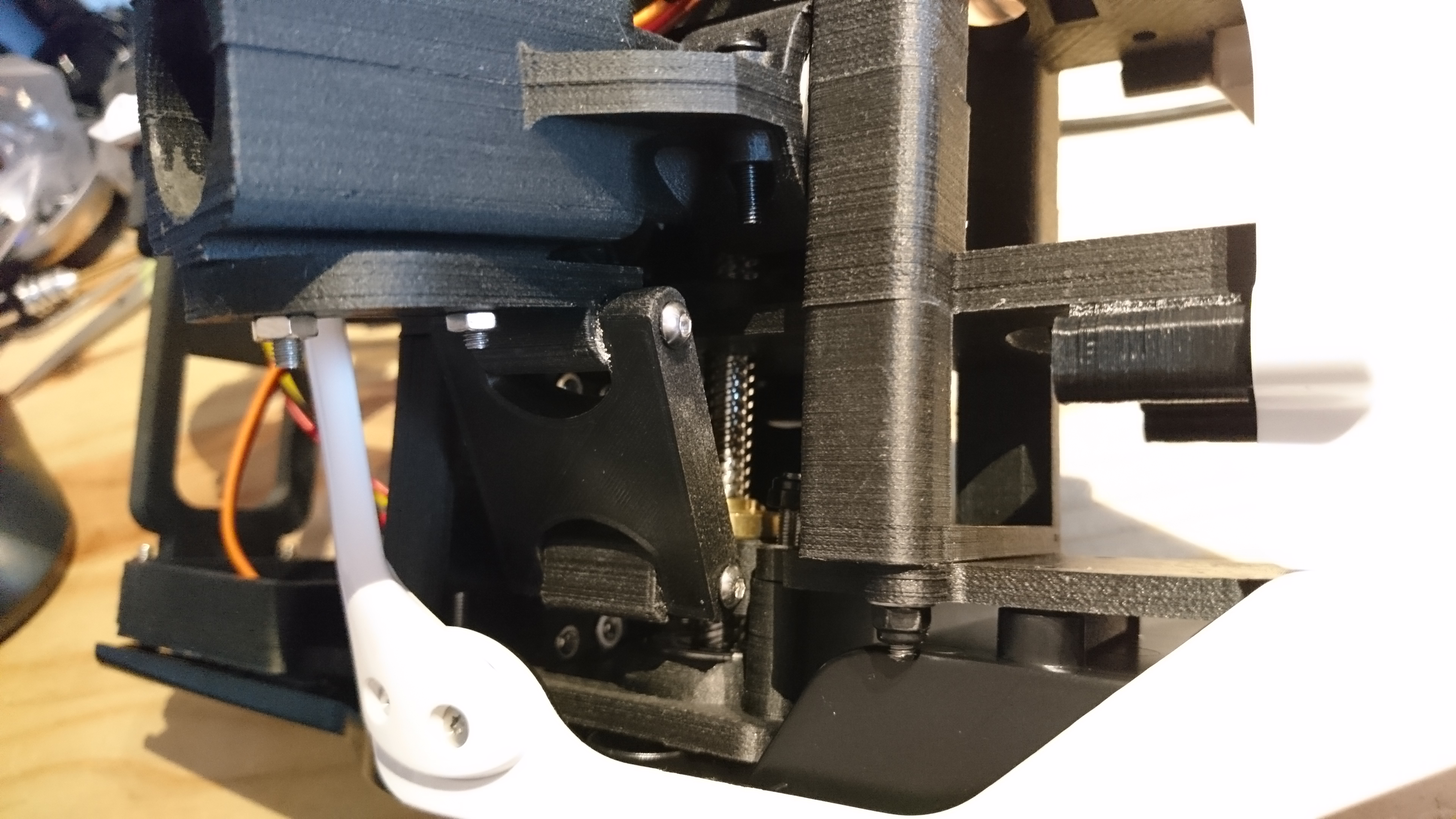
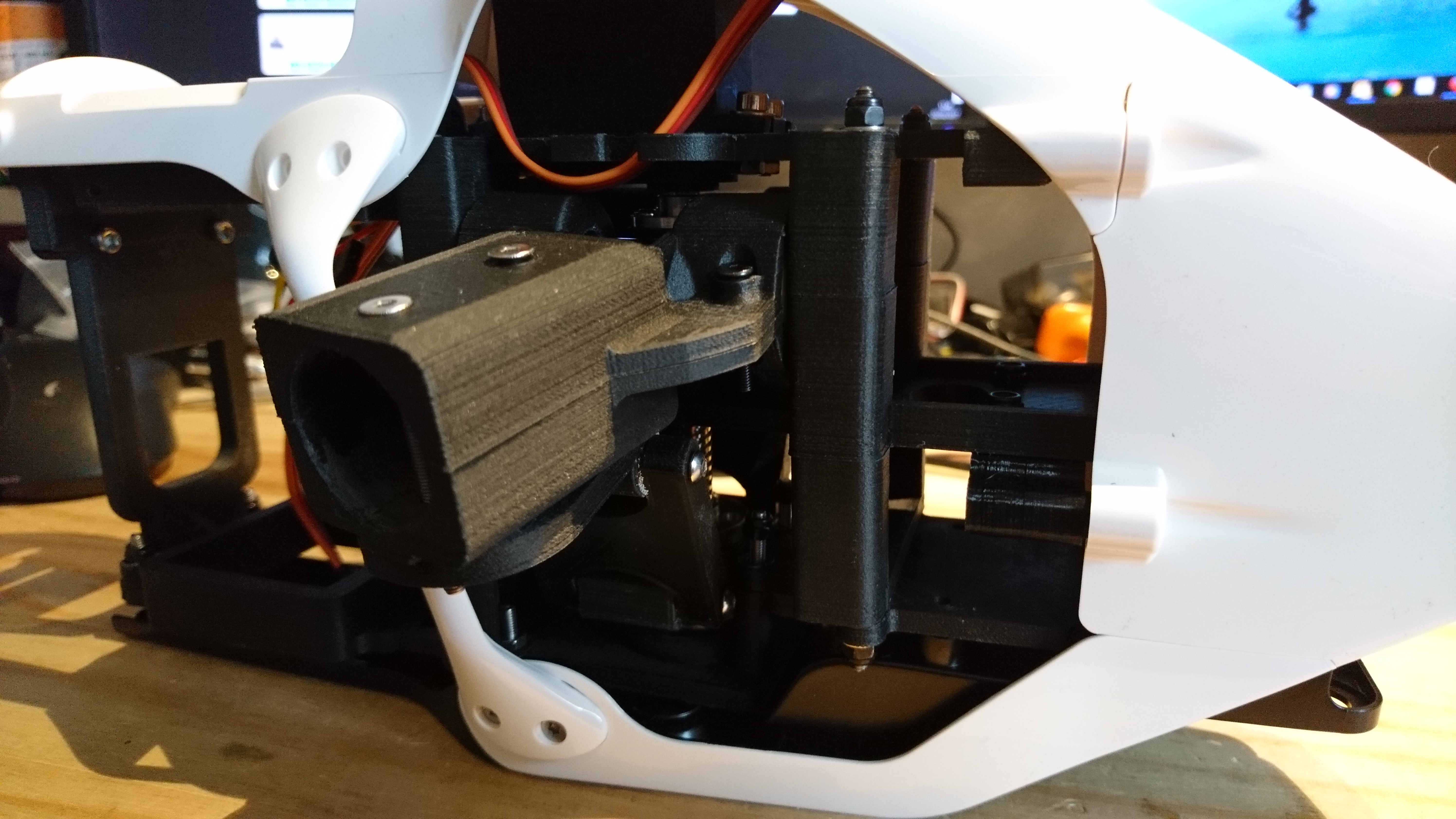
Voila le mécanisme de levage des bras de l’INSPIRED. Un simple système de vis sans fin.
Oui mais avec une vis de machine outil.