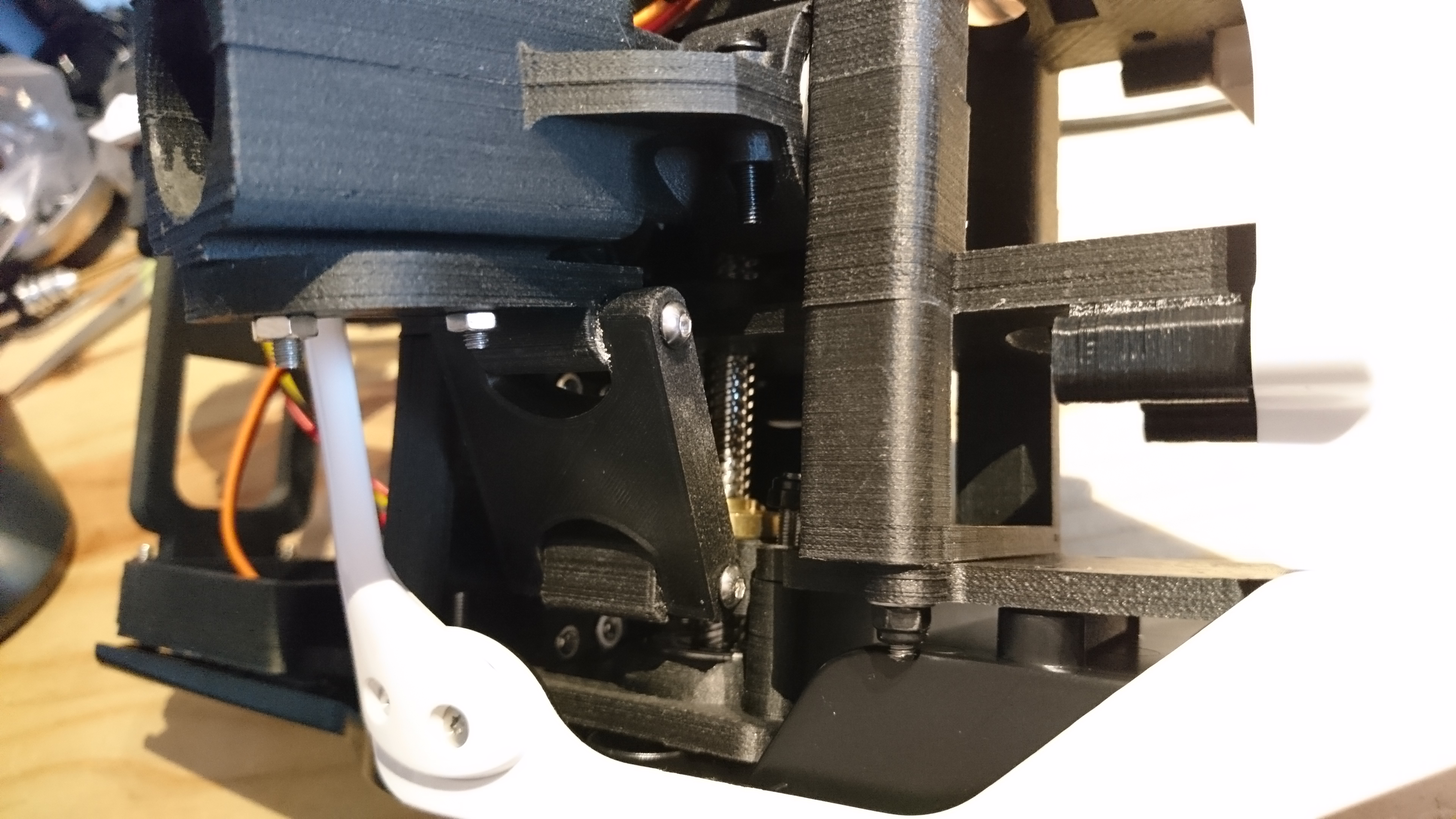
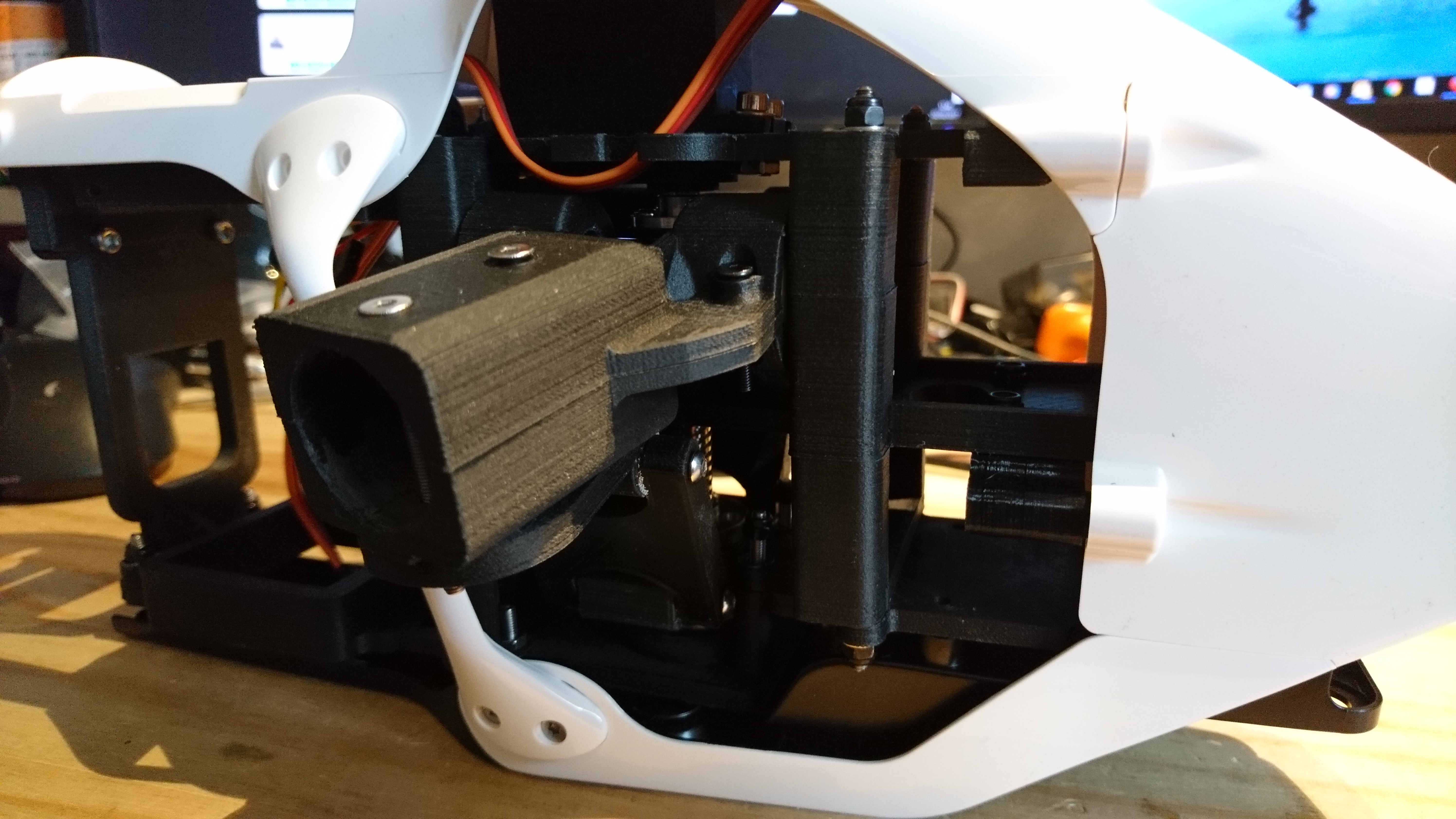
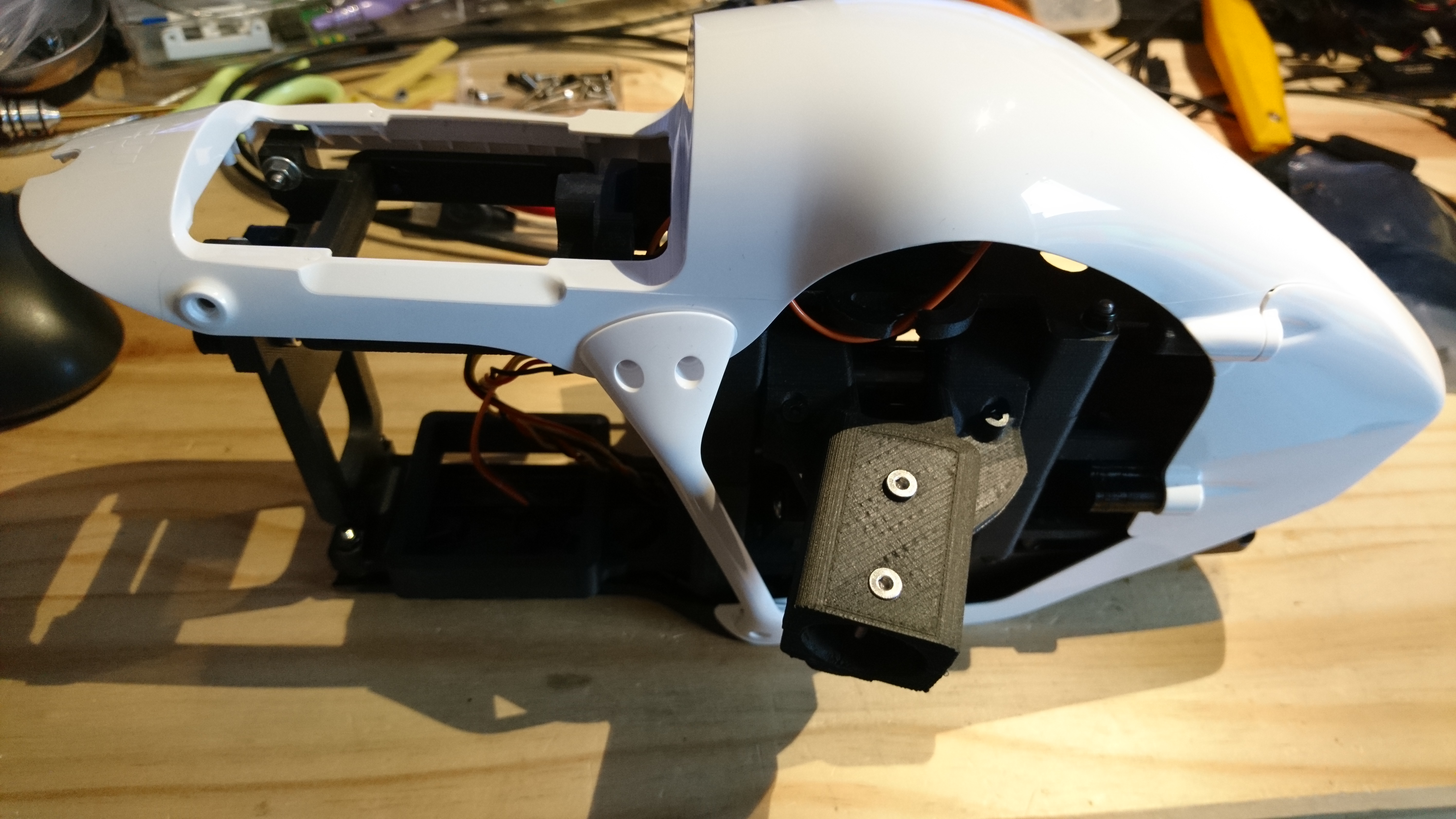
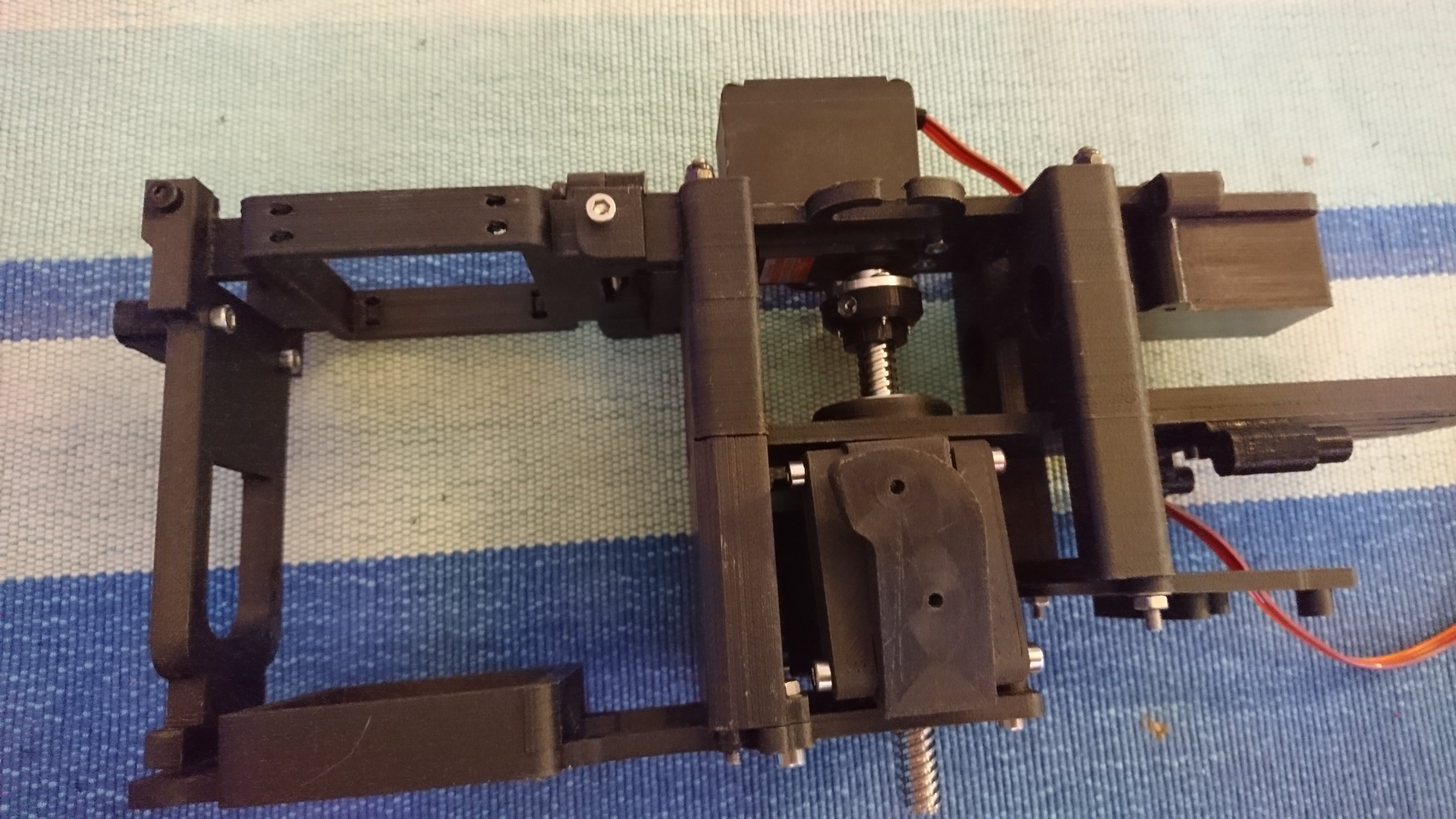
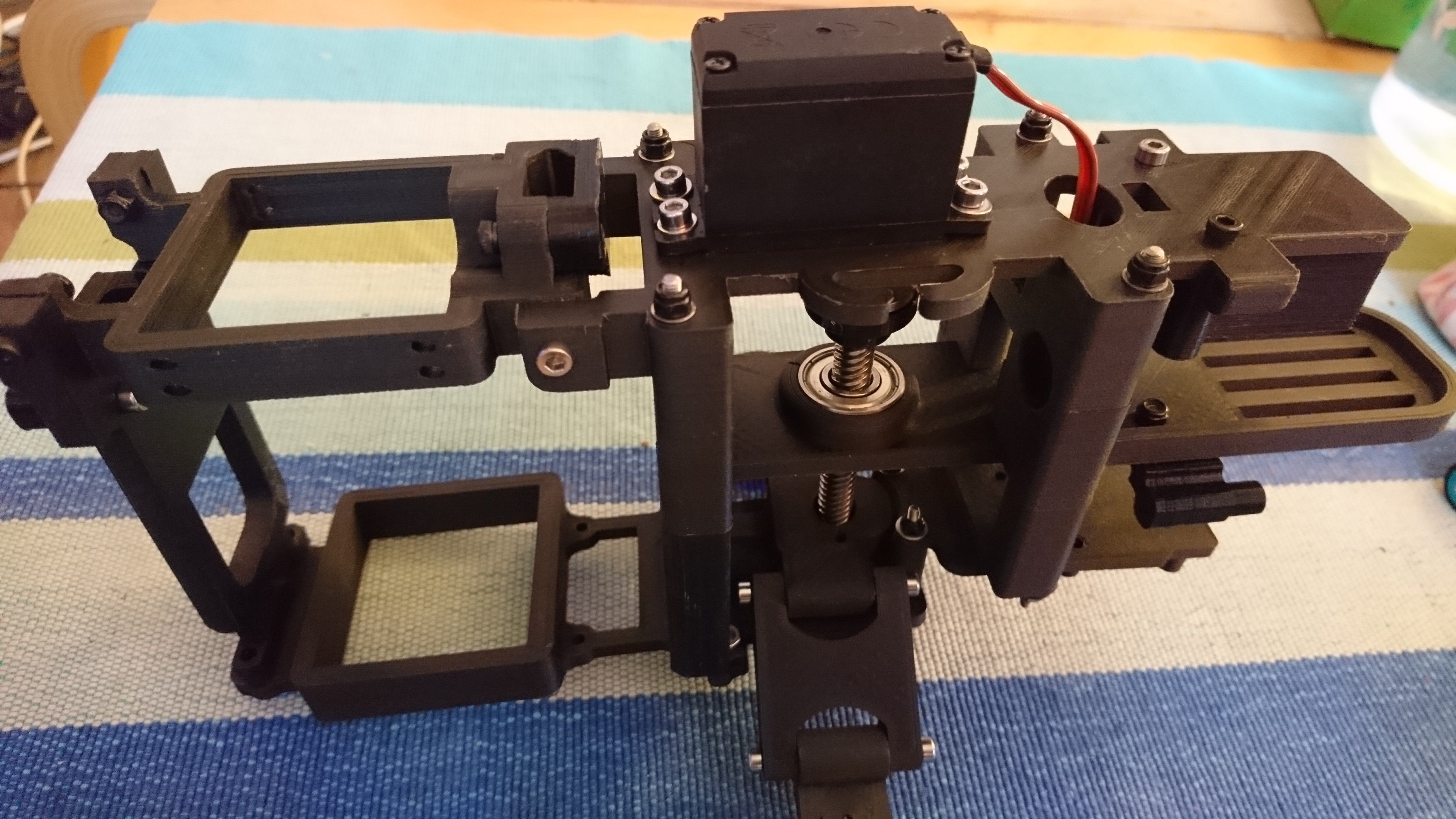
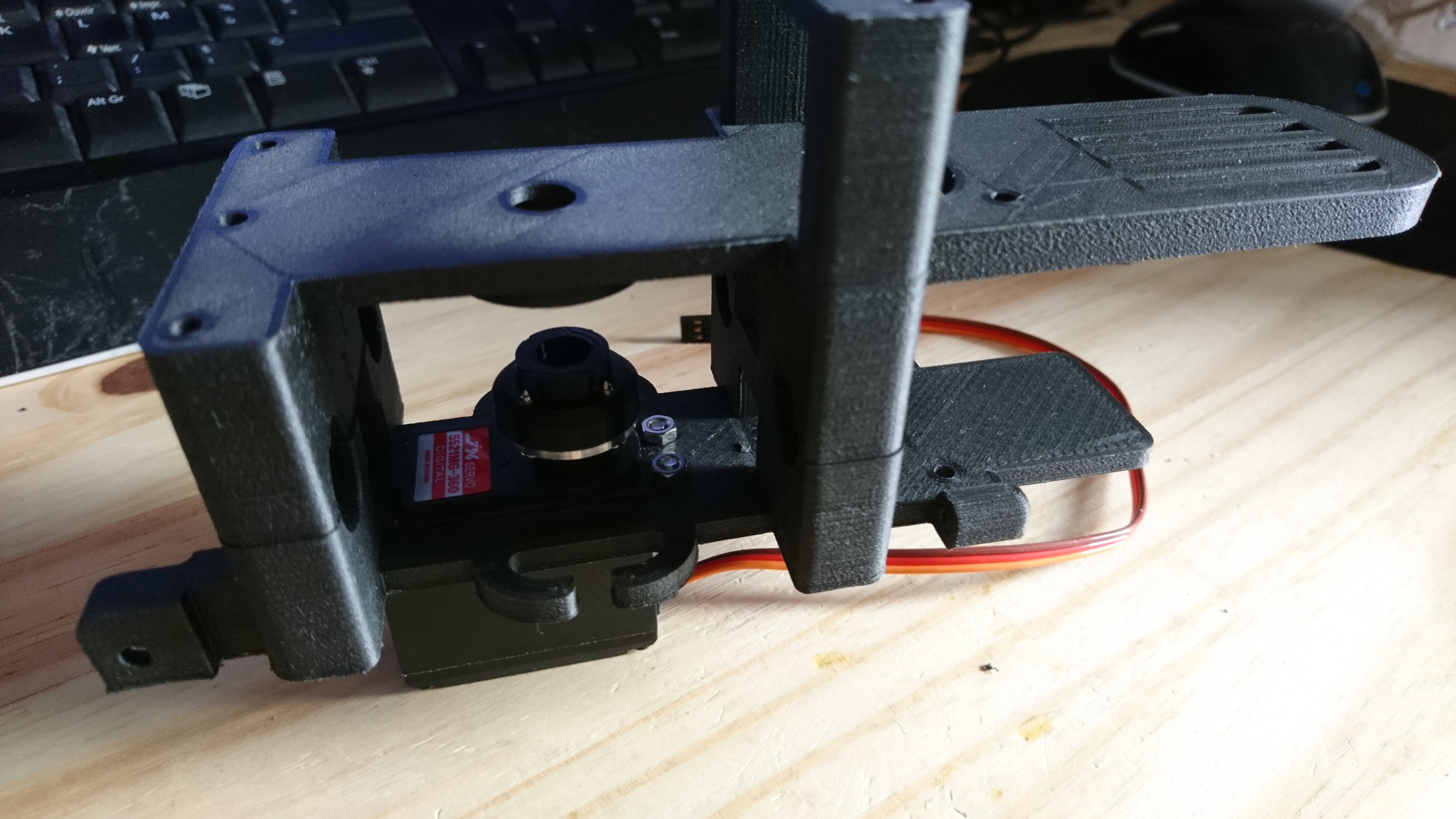
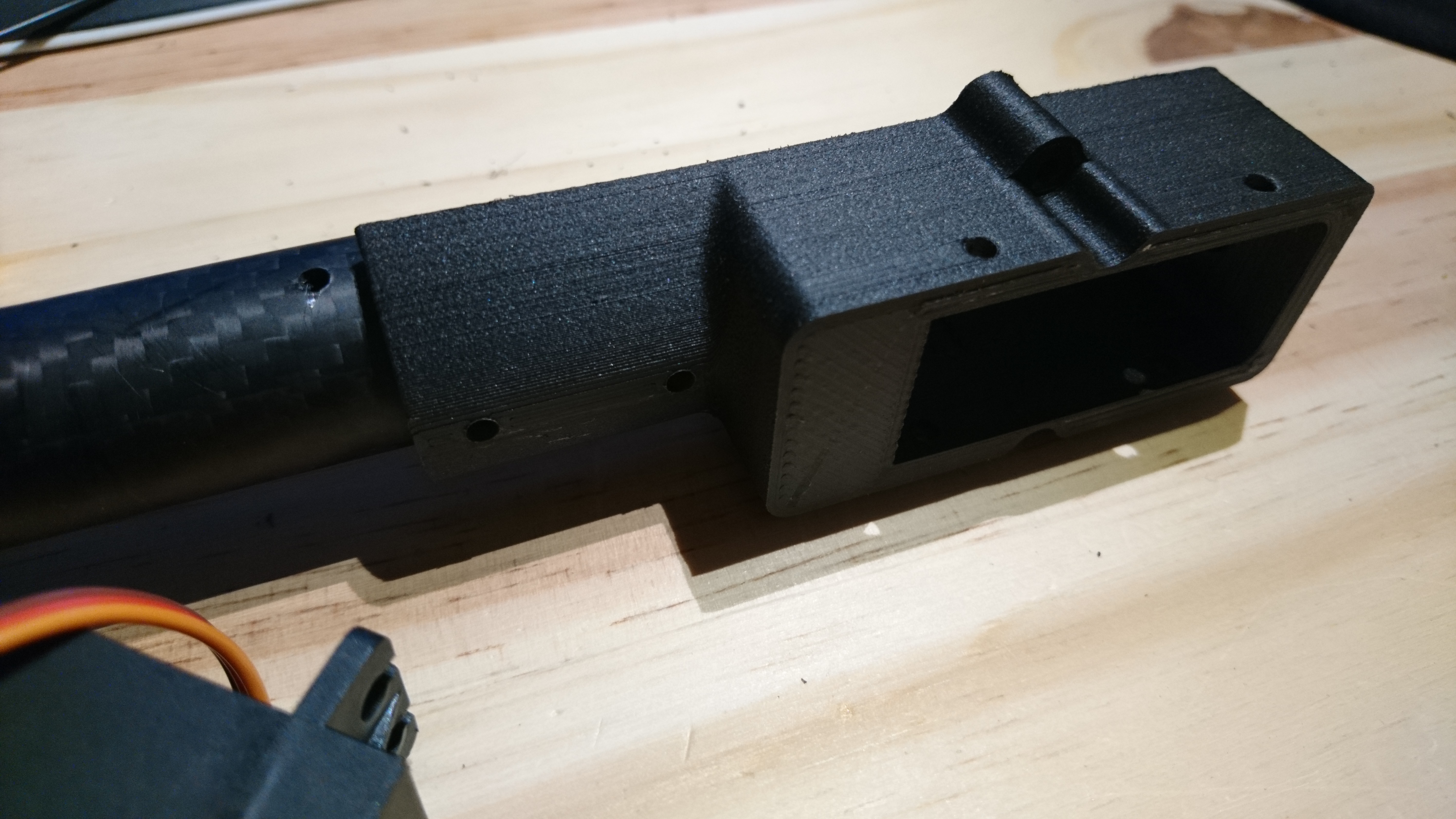
Pour piloter le train d’atterrissage , la solution que je souhaitais était d’utiliser un servo 360° que j’ai dans un coin, et des fins de course (haut et bas) afin de rendre le tout le plus facile à dépanner.
L’utilisation d’un arduino nano me semblait une évidence vu le coup faible du produit( Banggood ici ).
Un fin de course haut, un bas afin de piloter l’arrêt du servo, le dessin est clair dans ma tête, mais ne maitrisant pas la programmation…
je me suis mis en tête de trouver un code sur le web.
Les bibliothèques sont disponible sur le web, et l’utilisation du logiciel Arduino plus ancien ( 1.0.5-r2) a été nécessaire pour pour faire tourner le sketch .
Voici une évolution grâce à Fred qui a réalisé le code arduino:
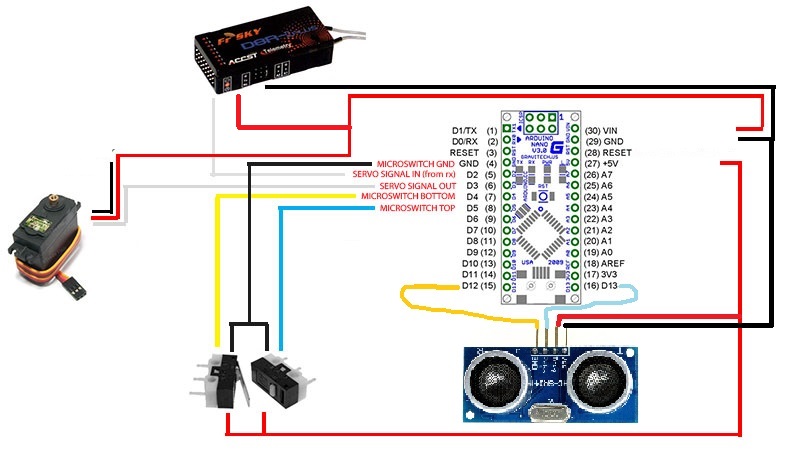
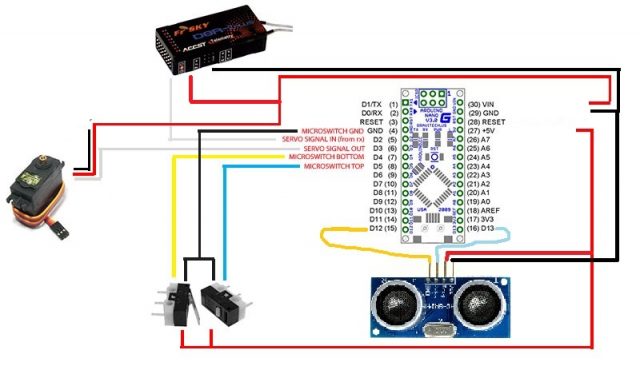
L’utilisation du capteur ultrason. Lorsque le switch 3 position de la radio sera sur la position centre, rend le système automatique. Si machine au dessus de 2m alors on monte le train, si la machine est en dessous de 2m on baisse le train. Et toujours la possibilité de forcer le système par la mise en position du switch en position haute ou basse.
Le fichier ino que j’utiliserais: train-rentrant.ino
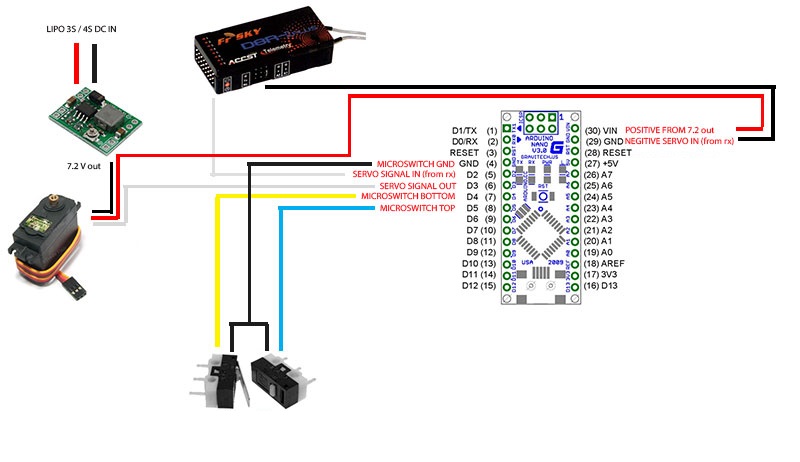
Et ci dessous le dessin de câblage
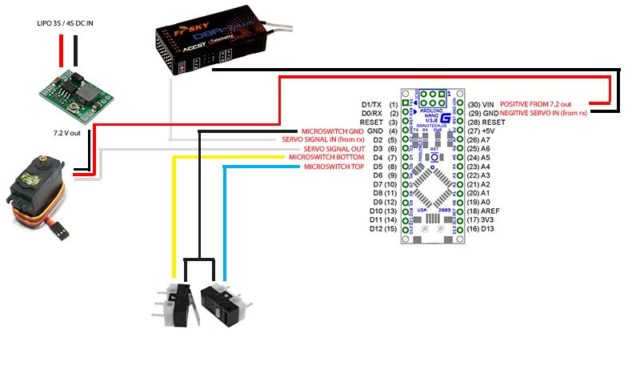
—Pour le moment—
Pour le moment je fonctionne plus ou moins (car j’ai un soucis de servo) sans le système à ultrason et avec un câblage un peu différent:
 et avec ce code que je doit nettoyer …
et avec ce code que je doit nettoyer …
Code utilisé
EnregistrerEnregistrer