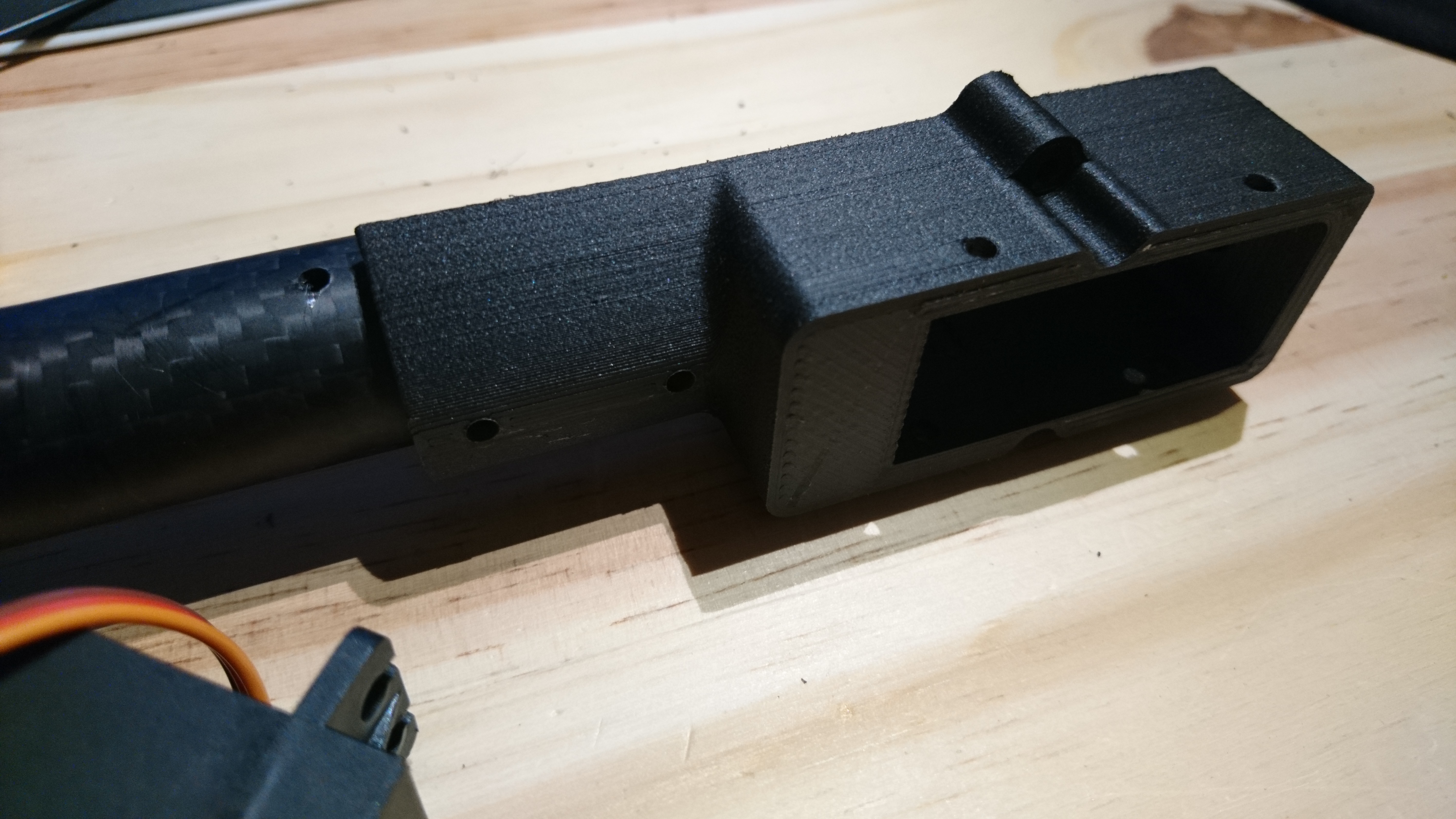
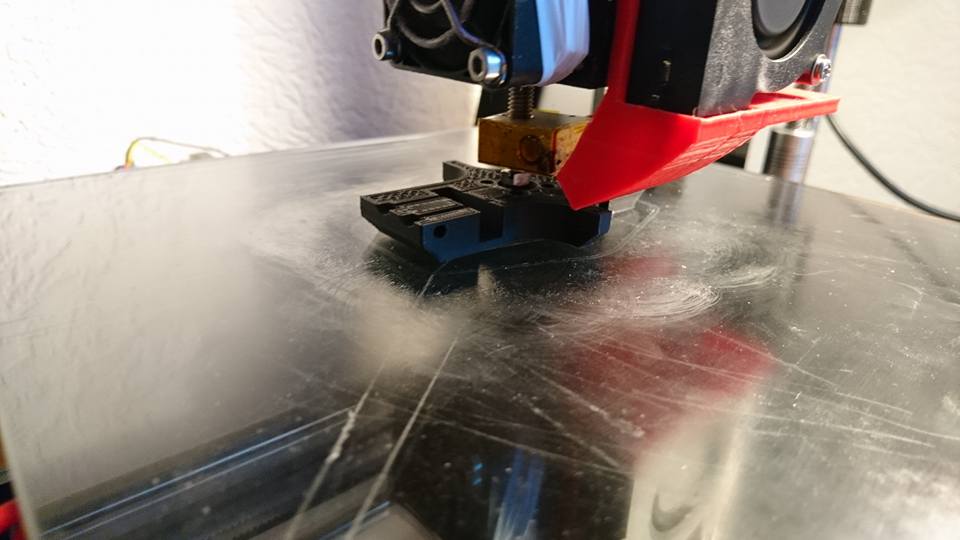
Je continue à imprimer , et c’est beau.
J’utilise du filament Proto-Pasta de chez ProtoPlant . C’est un PLA renforcé à 15% de fibre de carbone (Acheté ICI ).


Je continue à imprimer , et c’est beau.
J’utilise du filament Proto-Pasta de chez ProtoPlant . C’est un PLA renforcé à 15% de fibre de carbone (Acheté ICI ).
Copier ce qui existe, oui et grâce à l’impression 3d tous devient possible.
Le Dji Insipre est une très belle machine mais d’un prix hors norme.
J’ai dans le bureau pas mal d’équipement me permettant (en théorie) de monter une belle grosse machine.
Des hélices de 15pouces, des moteurs qui vont avec, une Pixhawk que je teste et qui vole depuis quelques jours (enfin)… du tube carbone Diamètre 22mm.
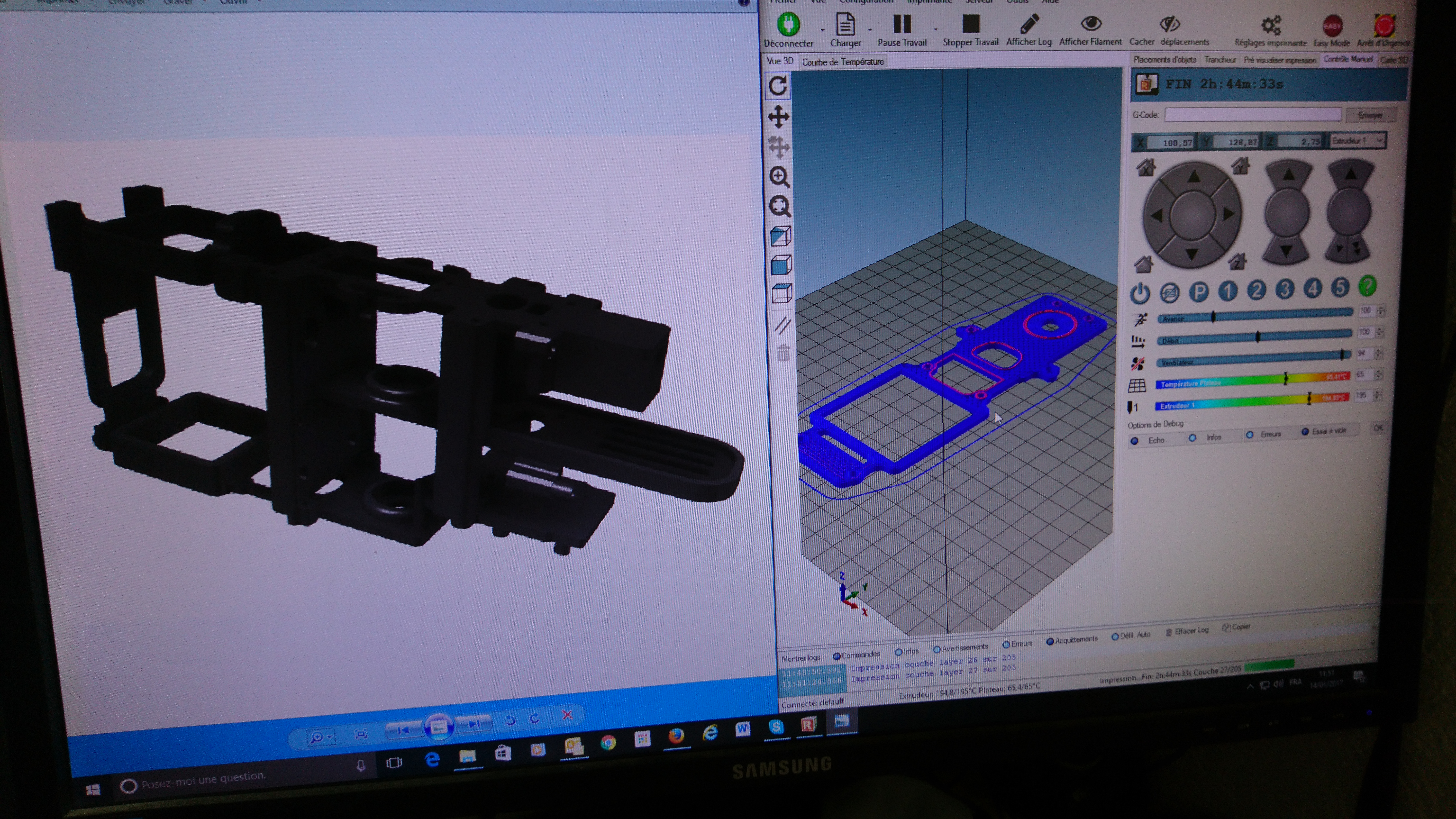
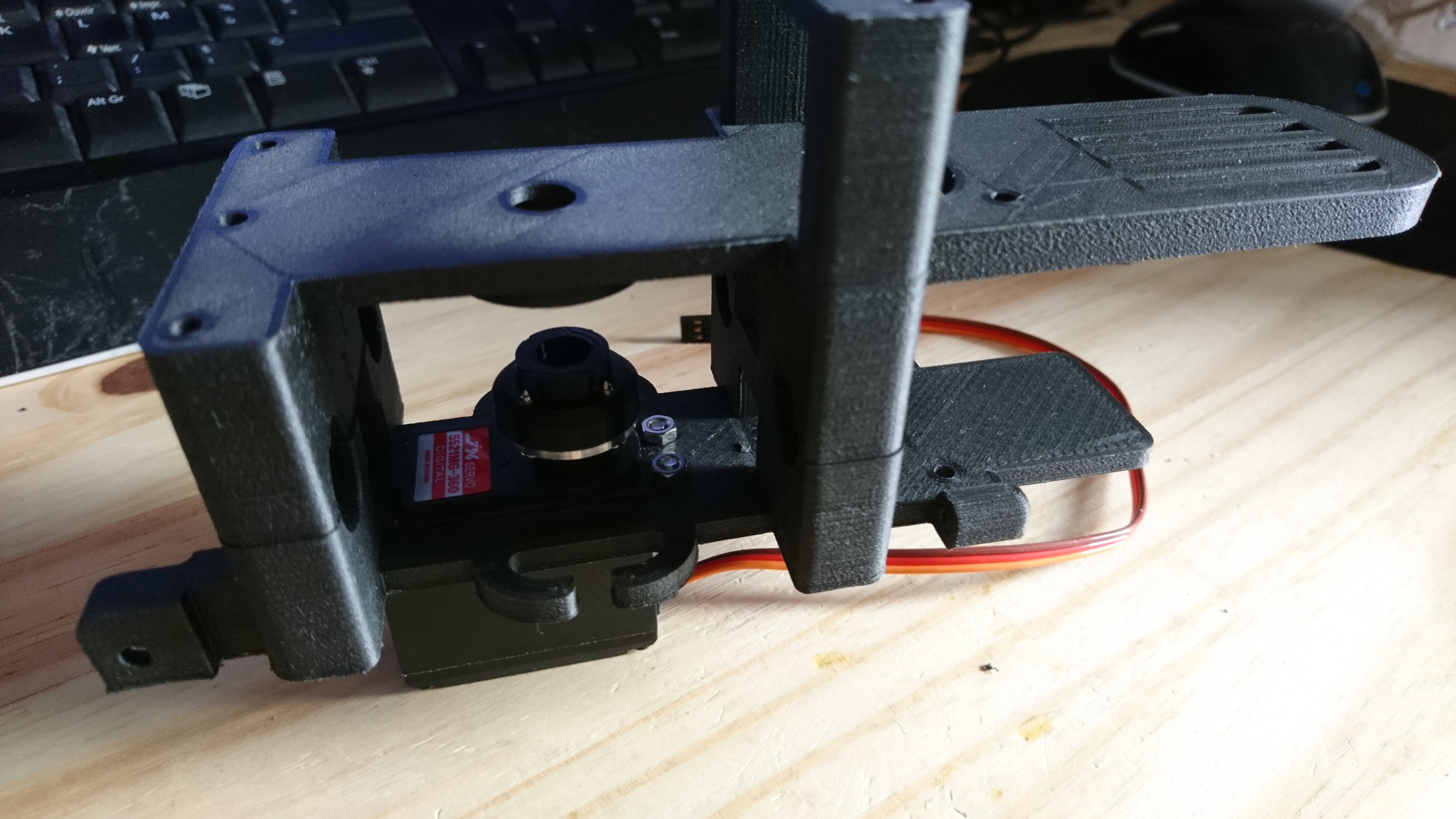
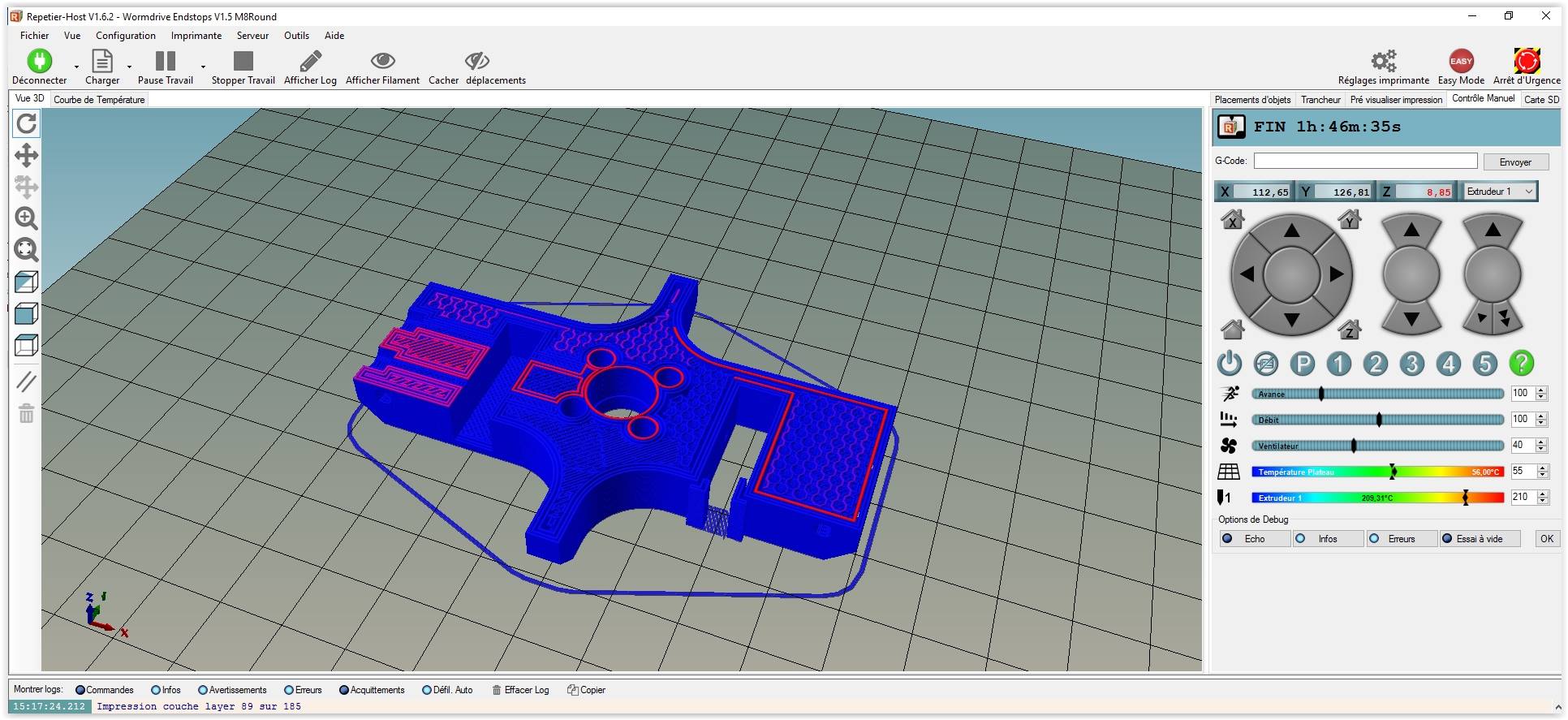
Donc un mix de 2 projets Thingiverse devrait voir le jours cette année:
http://diyrc.co.uk/3d-printed-inspire-clone/ : ici la version 1.4 me plait bien enfin les pieds sont sympa, il reste juste le les support moteur a redesigner
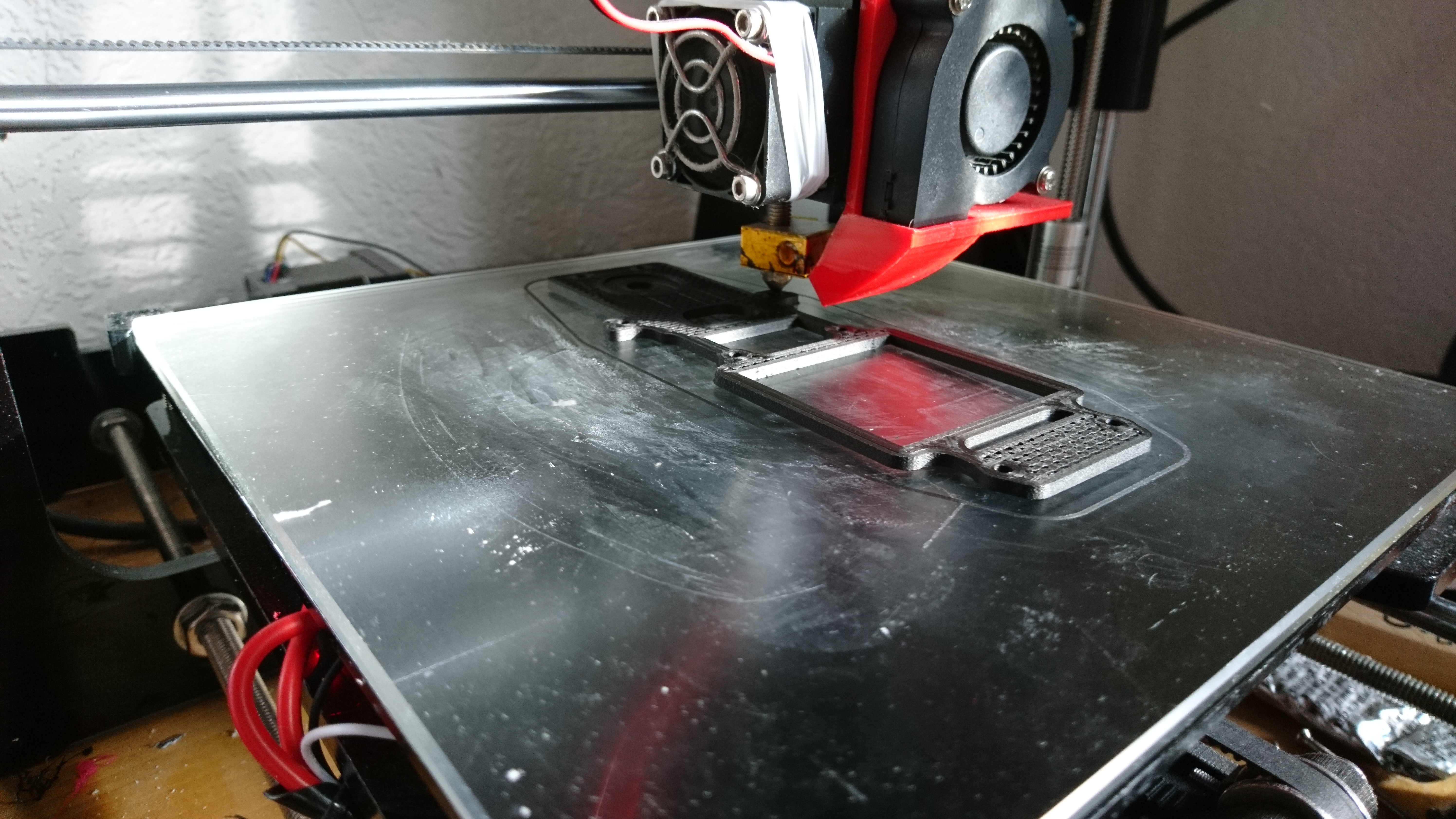
Et me voila lancé dans l’impression de quelques pièces

@ suivre
Vole du 18 Aout, en Normandie au dessus de la maison Familiale, et teste en mode autonome (vole par point gps):
Session du 26 juillet 2014:
Petite session dernière semaine de Mai:
Premier vole de mon hexarotor, baptisé « SuperBUS ».
La carte de contrôle est la Zero-uav YS-X6
Moteur T-motor MT3506-25
Hélices 11 pouces
Accus Zippy 8A/h 4s
Autonomie record pour moi, 14min…
Essai de nacelle sur quadri rotor
Quadri Rabbit par laverre.com
Vidéo
Vol embarqué Sept-Vents par laverre
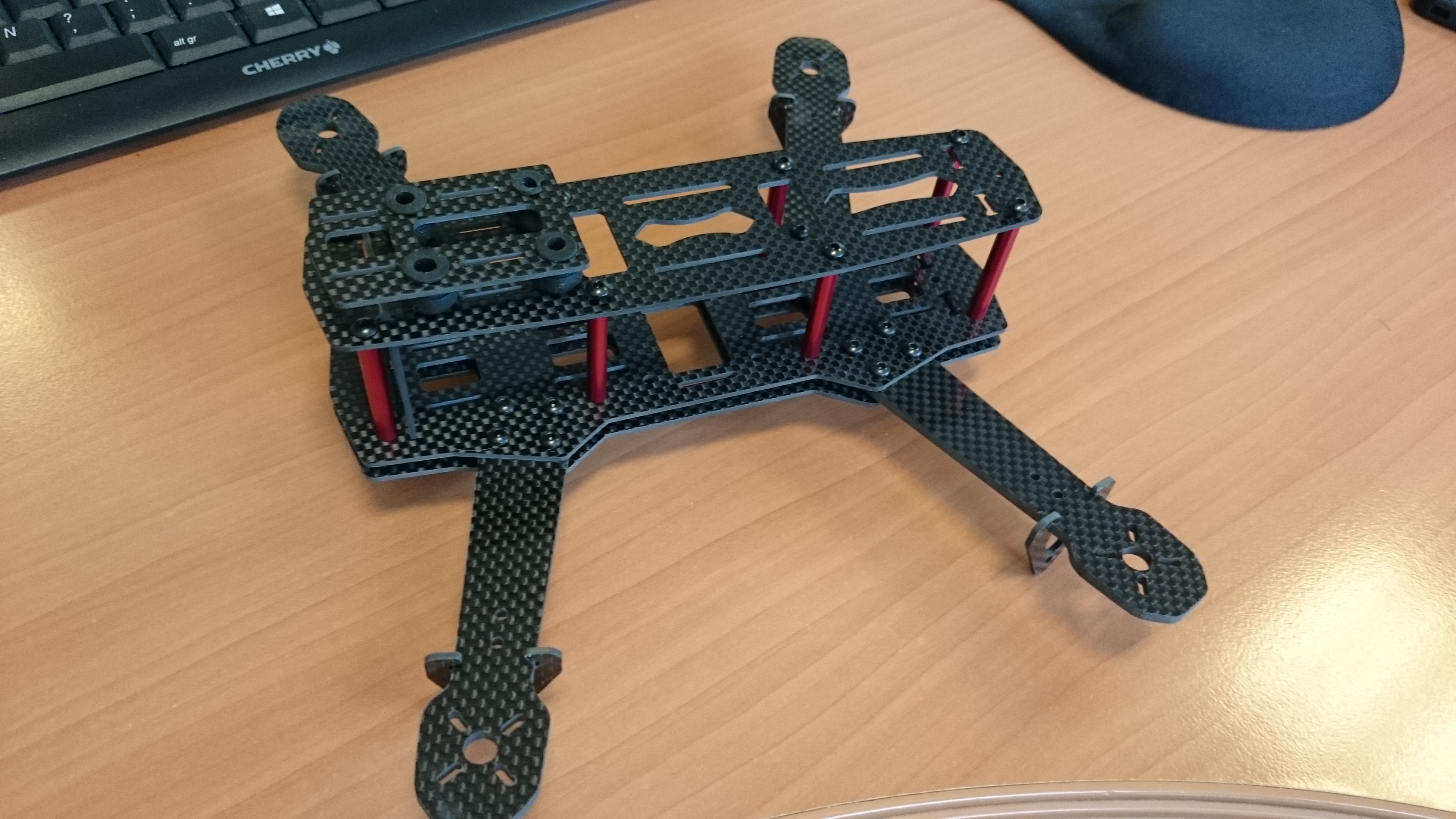
Il est arrivé il y a peu, ce n’est pas un QAV 250, c’est une copie.
Voila la petite bête montée:

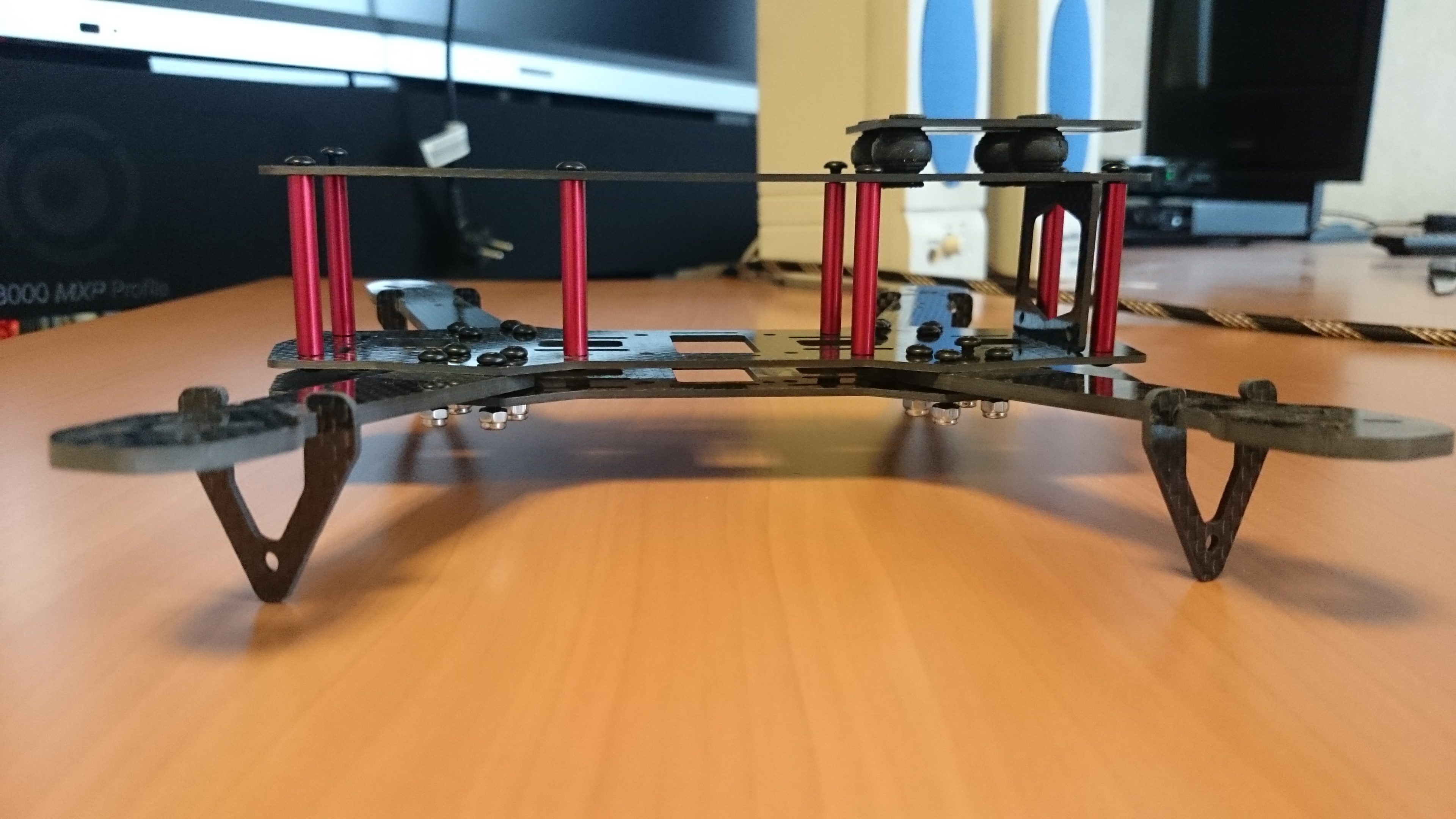


Petit petit petit.
Oui un châssis de 250 est en cours de montage.
Un 250 c’est quoi?
C’est un châssis de 25 cm de diagonal moteur.
A quoi cela sert?
A rien c’est du modélisme… mais je vais l’utiliser pour faire du low-riding (voler vite a basse altitude, comme dans la course de POD star wars).
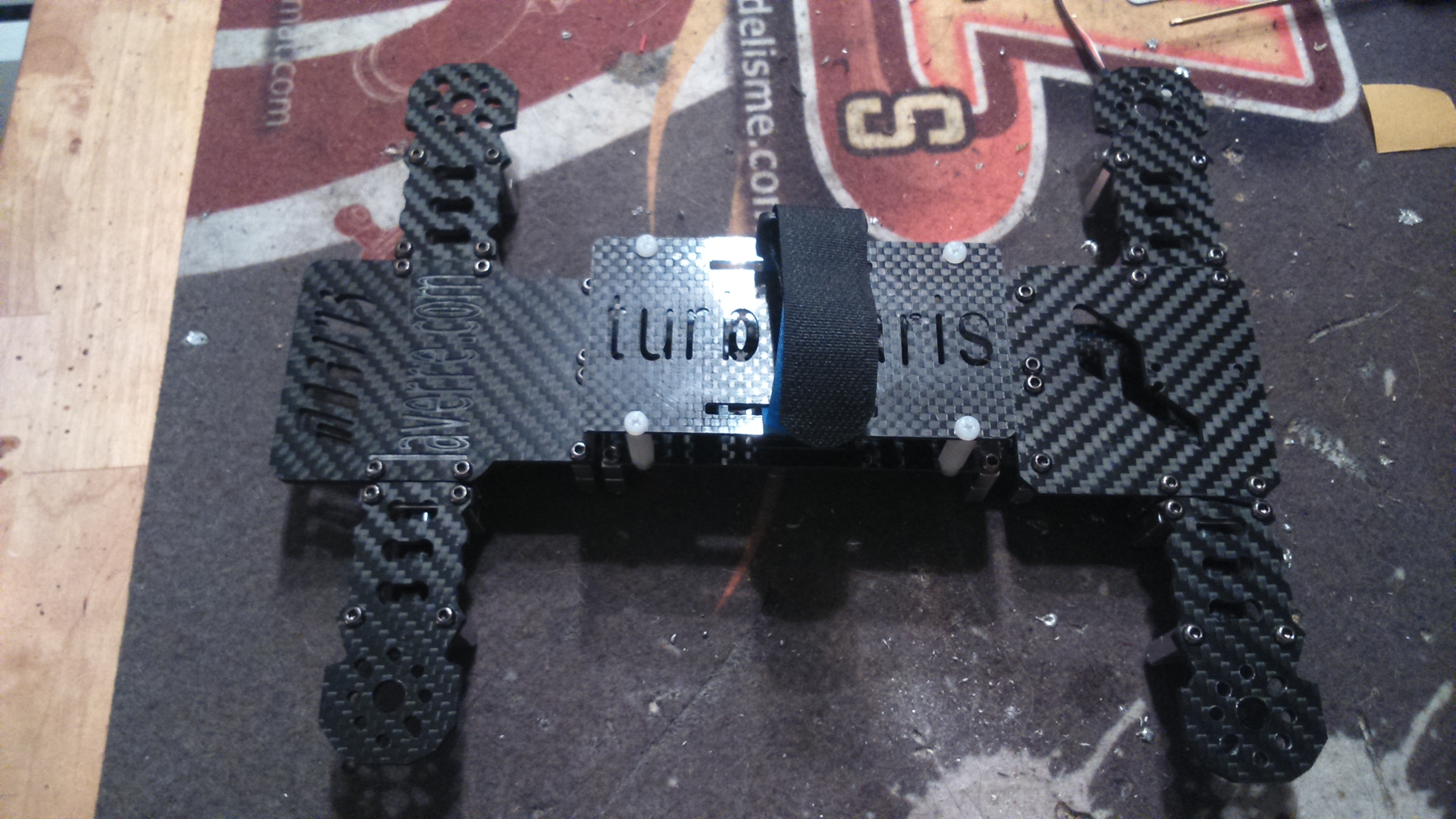
une carte de contrôle naze32 full
des ESC 12A des hélices 5″
surement une ou 2 led pour faire joli.
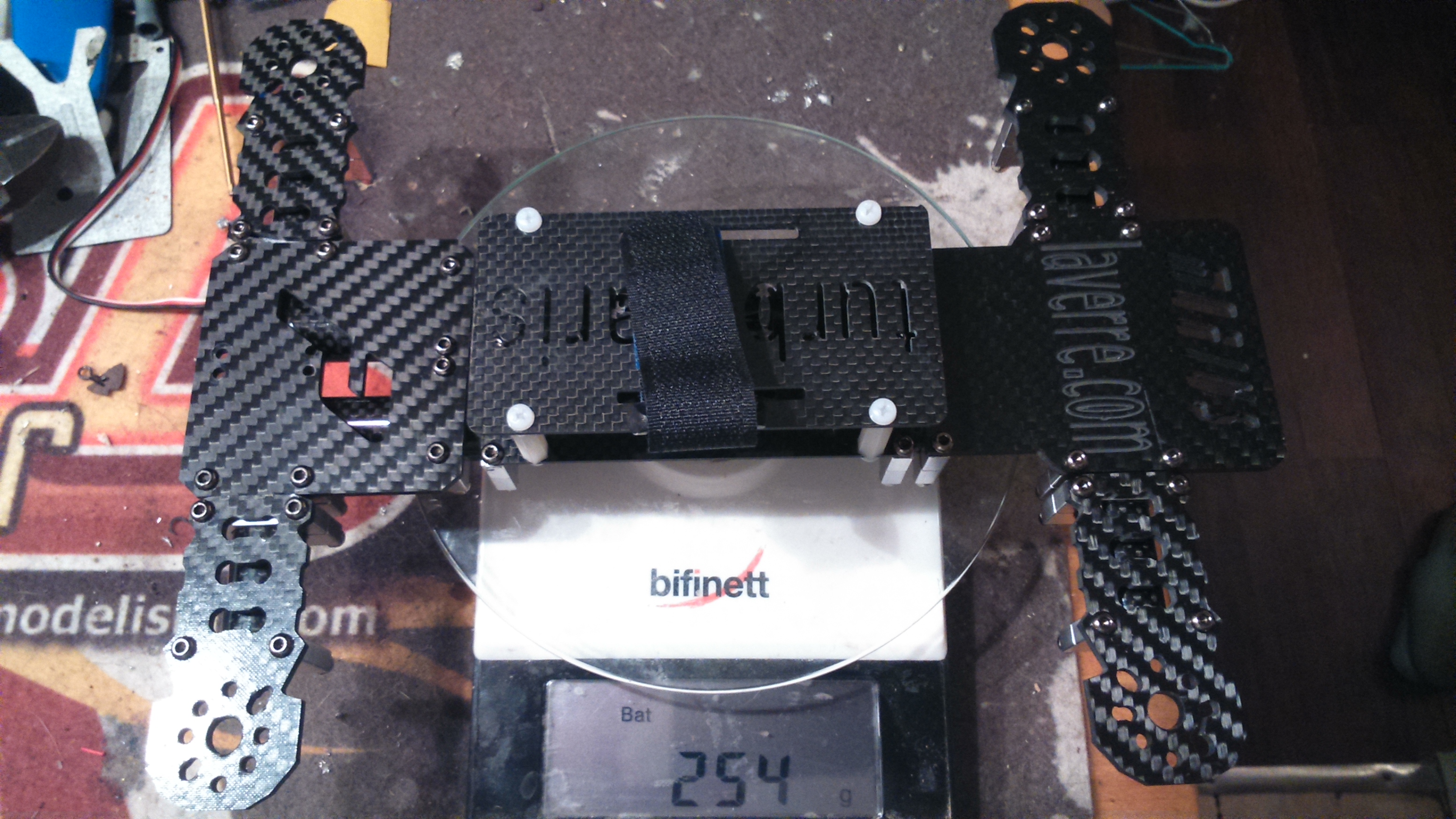
Et surement une légère cure amaigrissement car je le pense un peu lourd (mais bon dans la vie, il y en a qui sont lourd et on fait avec…)
















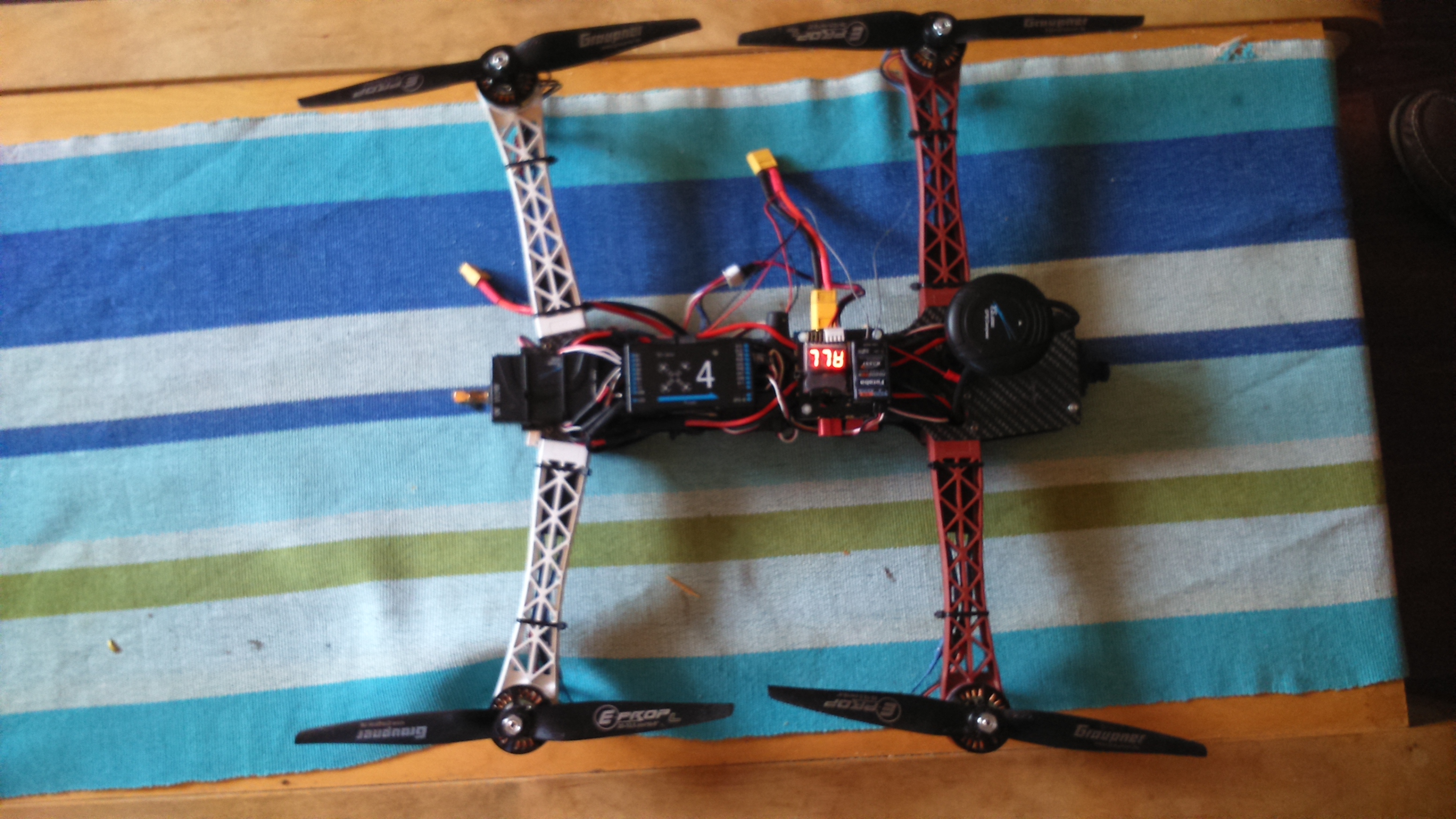
Depuis noël je suis sur un hexacopter, je l’ai baptisé « SuperBUS »
La carte de contrôle: Zero-uav YS-X4
Les Moteurs: T-motor MT3506-25 avec des Esc 30A flashé Simonk
Hélices: 11 pouces Graupner ou 13 pouces T-motor (1355)
Accus: Zippy 8A/h 4s
Je suis a plus de 3Kg dans cette configuration.

La nacelle est une Brushless avec une carte de control Simple Brushless
Gimbal Controller, peu évidente a configurer, mais une fois fait, c’est une vrai bonheur.



Je viens de monter des LED sous les moteurs, l’intérêt est de reconnaitre l’avant de l’arrière, mais aussi en cas de basse tension de l’accu, le système clignote .




En faite non, il s’agit de ma plateforme de test, qui a reçu dans le passé des carte comme la Rabbit, une KK2 dernièrement une plateforme multi wii
Maintenant elle est équipe de la carte Zero uav YS-X4 ( oui encore du Zéro UAV, désolé perso les solutions qui fonctionnent, les constructeurs sympa comme eux, J’aime).
Le nouveau quadri H Leraverlaris des bras de F550 Dji ‘enfin pas tous a fais…)
Et un châssis perso usiné par un Amis, place aux images:







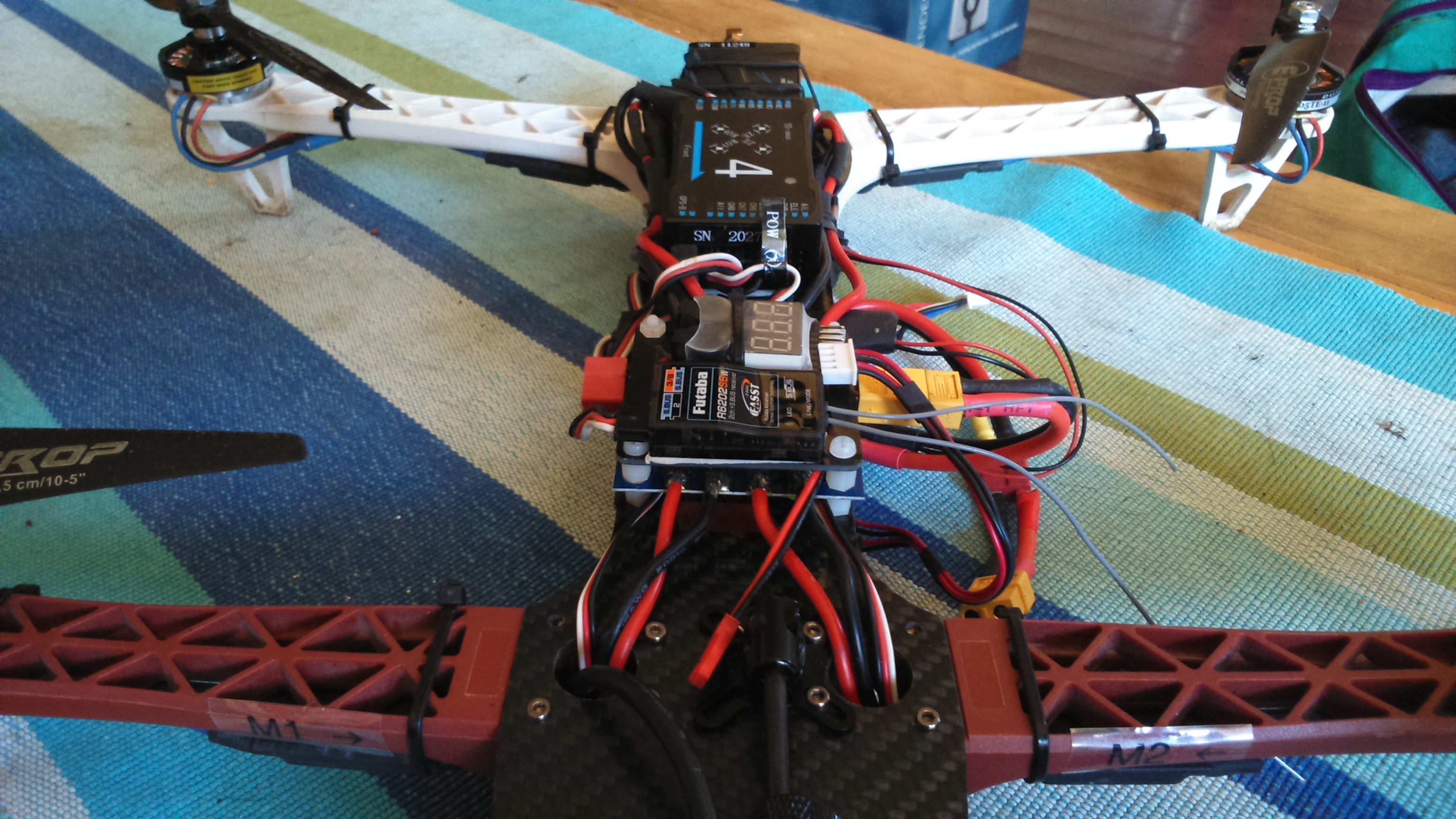





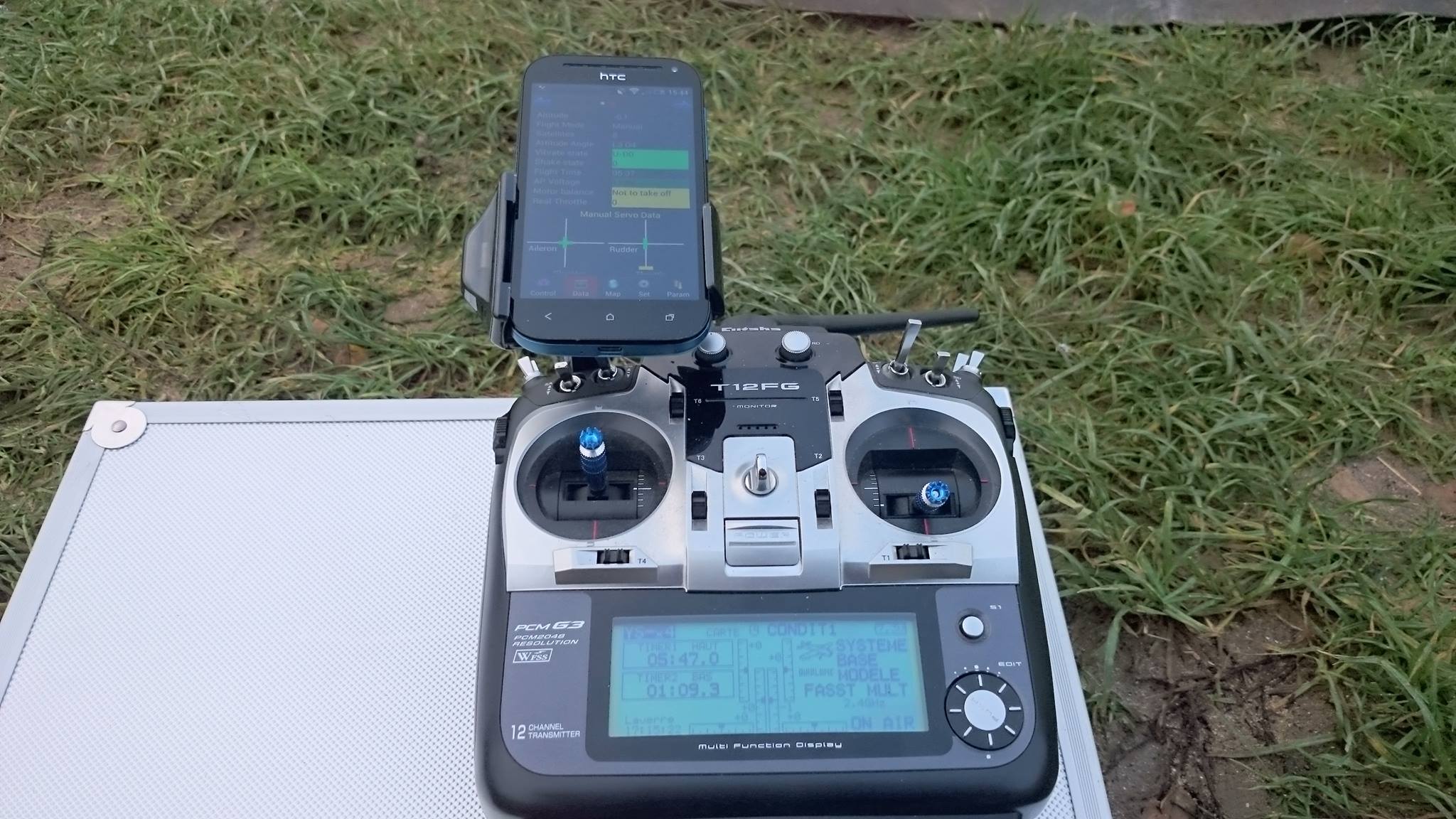
Voici la version Anglaise de la notice de la carte S4 de zero uav:
La VF viendra bientôt.
La carte donne quoi?

En faite Zéro UAV est le concurrent de Dji (en mieux…) et la carte S4 est en concurrence avec le naza .
Avec une différence de prix importante (170€ le naza lite contre 140€ le S4), mais surtout une stabilitée sans comparaison , une consommation électrique inferieur, un gps Bi réception (gps et Glonass), le S4 et vraiment devant.
Voici quelques évolutions, du Carbone, du Carbone, et encore du Carbone.
Sur les hélices, et en support Moteurs:

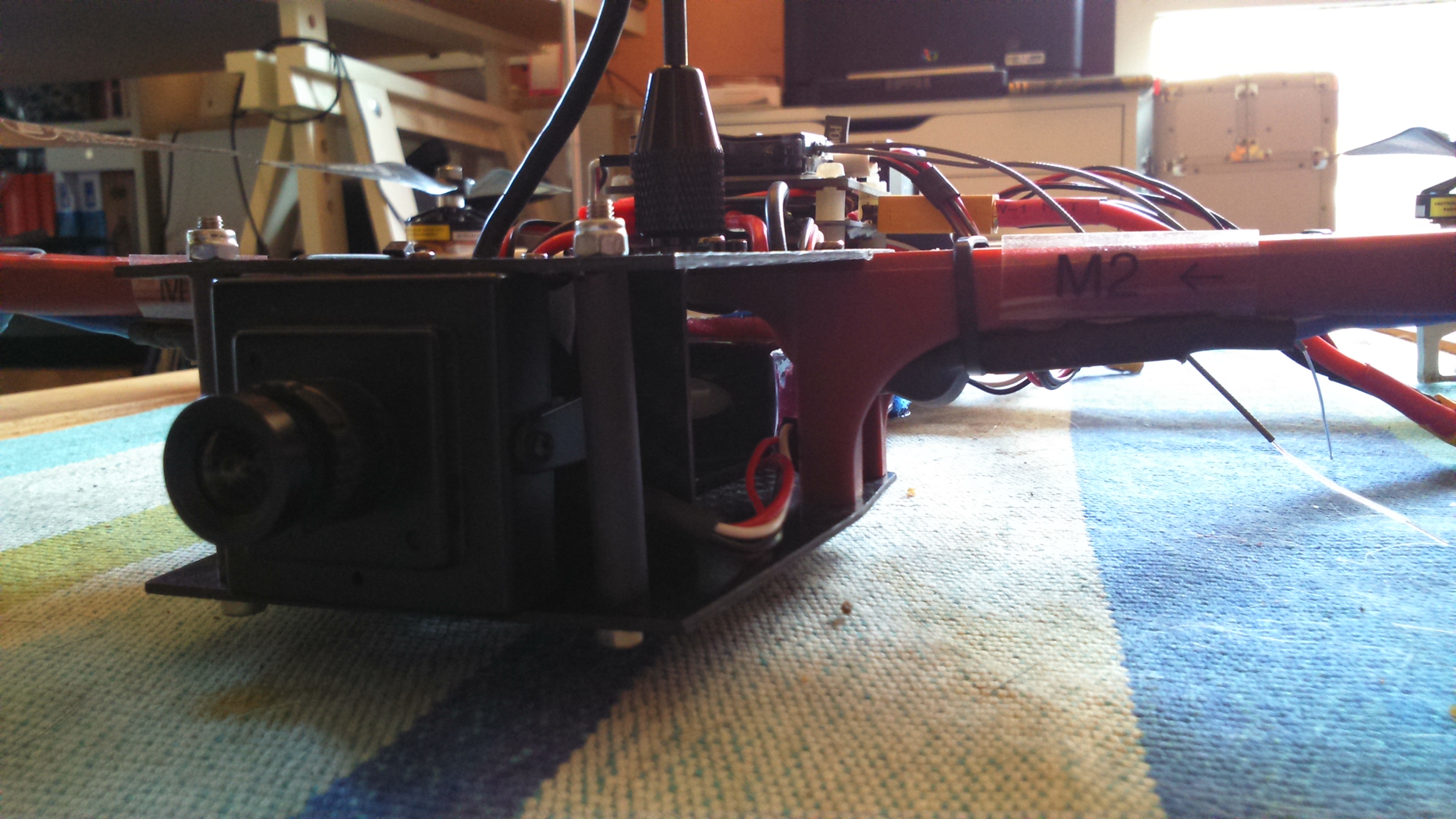
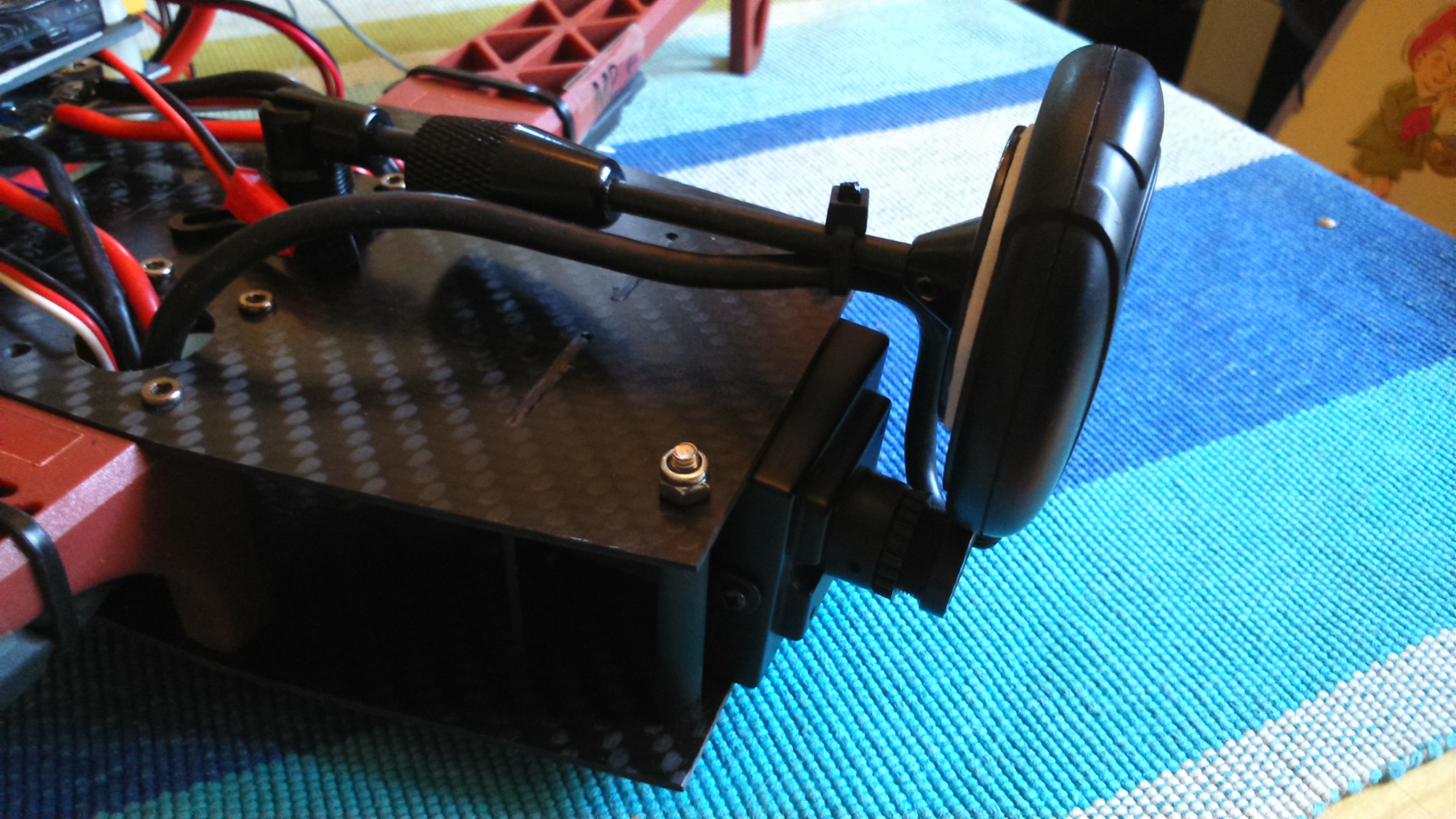
Je viens de monter une nacelle pour la GoPro, avec train atterrissage :

Au passage afin de me facilité certain paramétrage comme l’étalonnage des niveaux et Boussole, je vien de faire et d’installer une protection au dessus de la Rabbit:

Je suis passer au passage au 2.4Ghz à voir si la portée de cette fréquence sera aussi bonne que le 41Mhz.
A suivre…