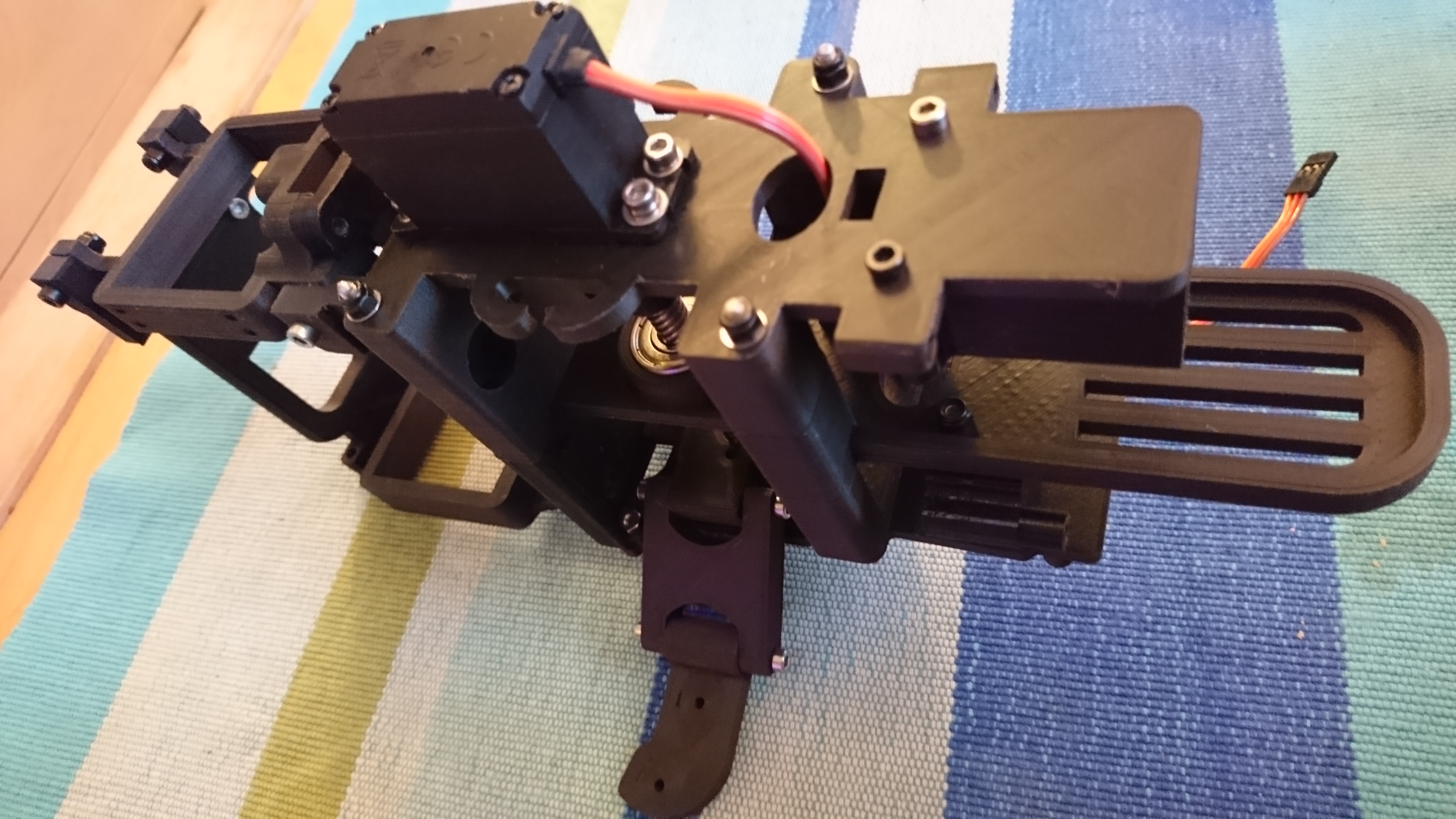
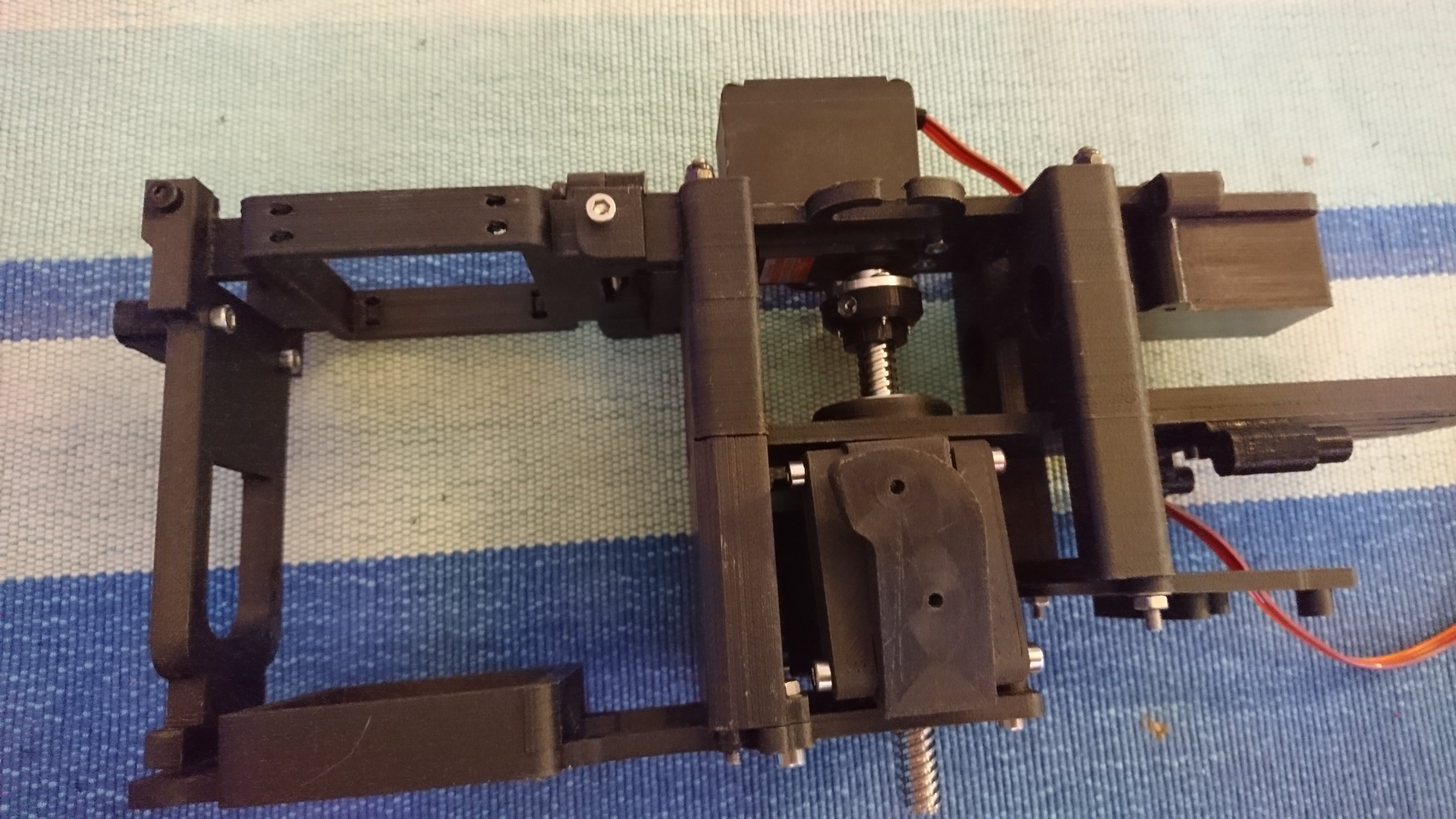
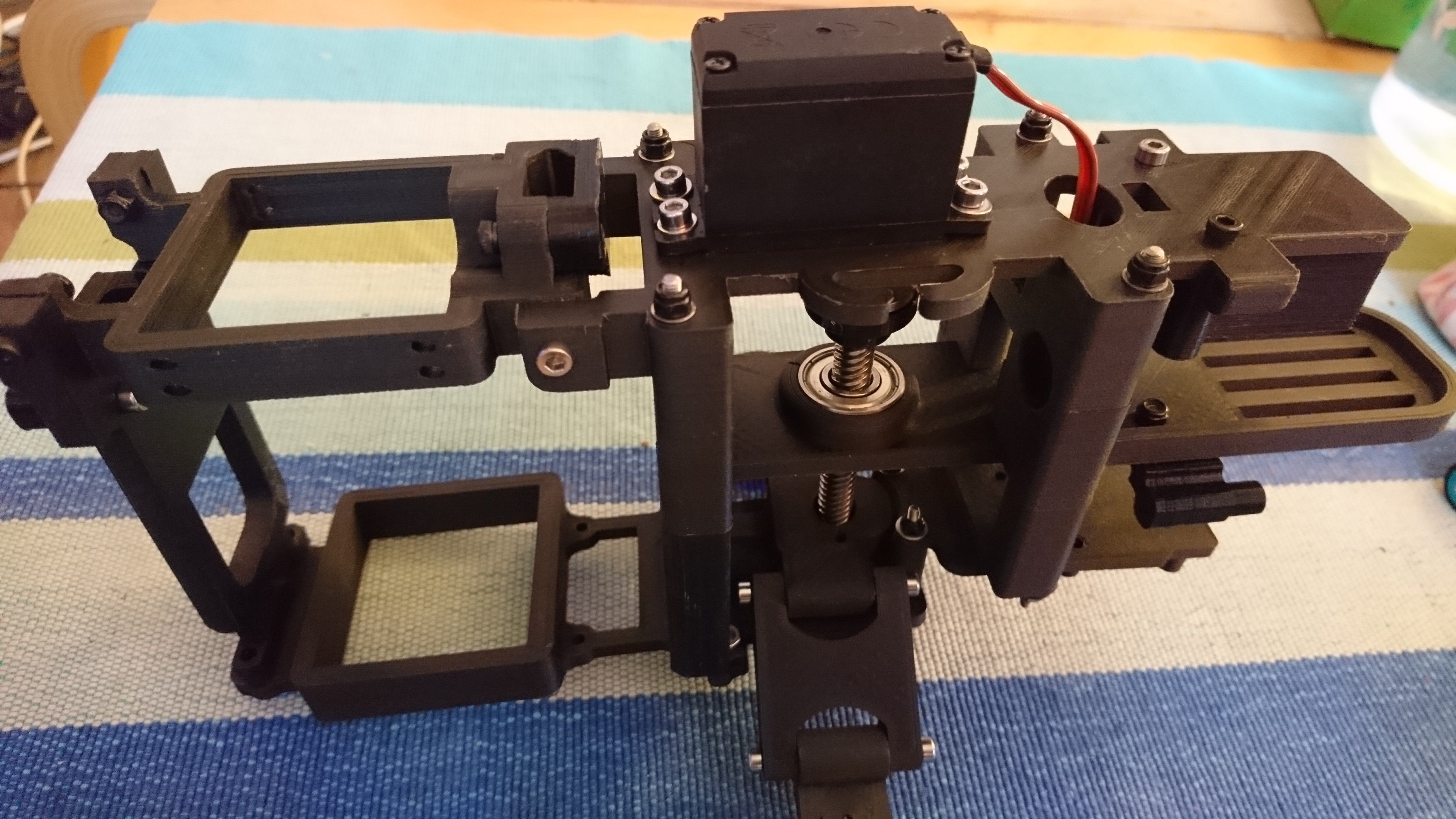
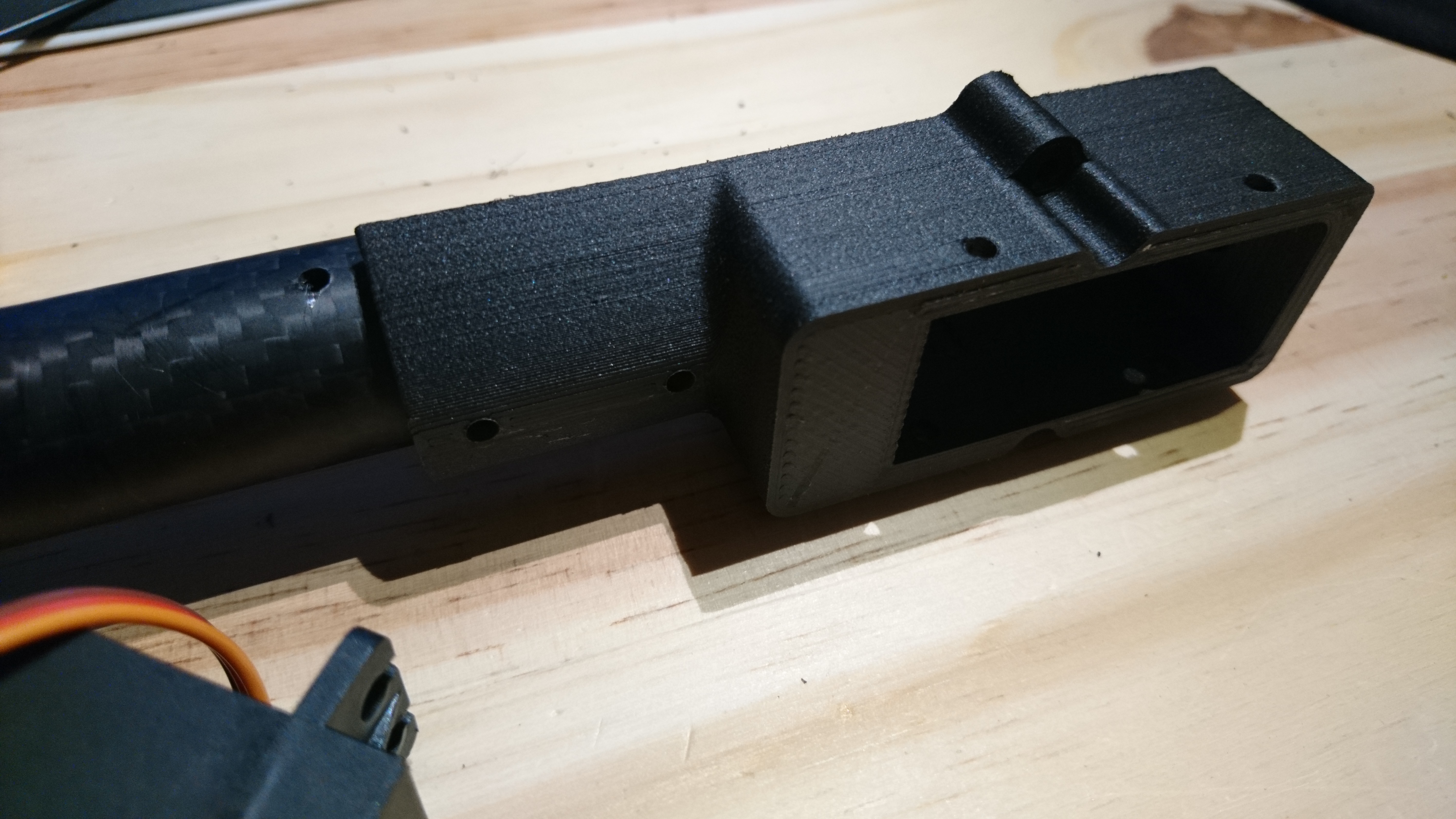
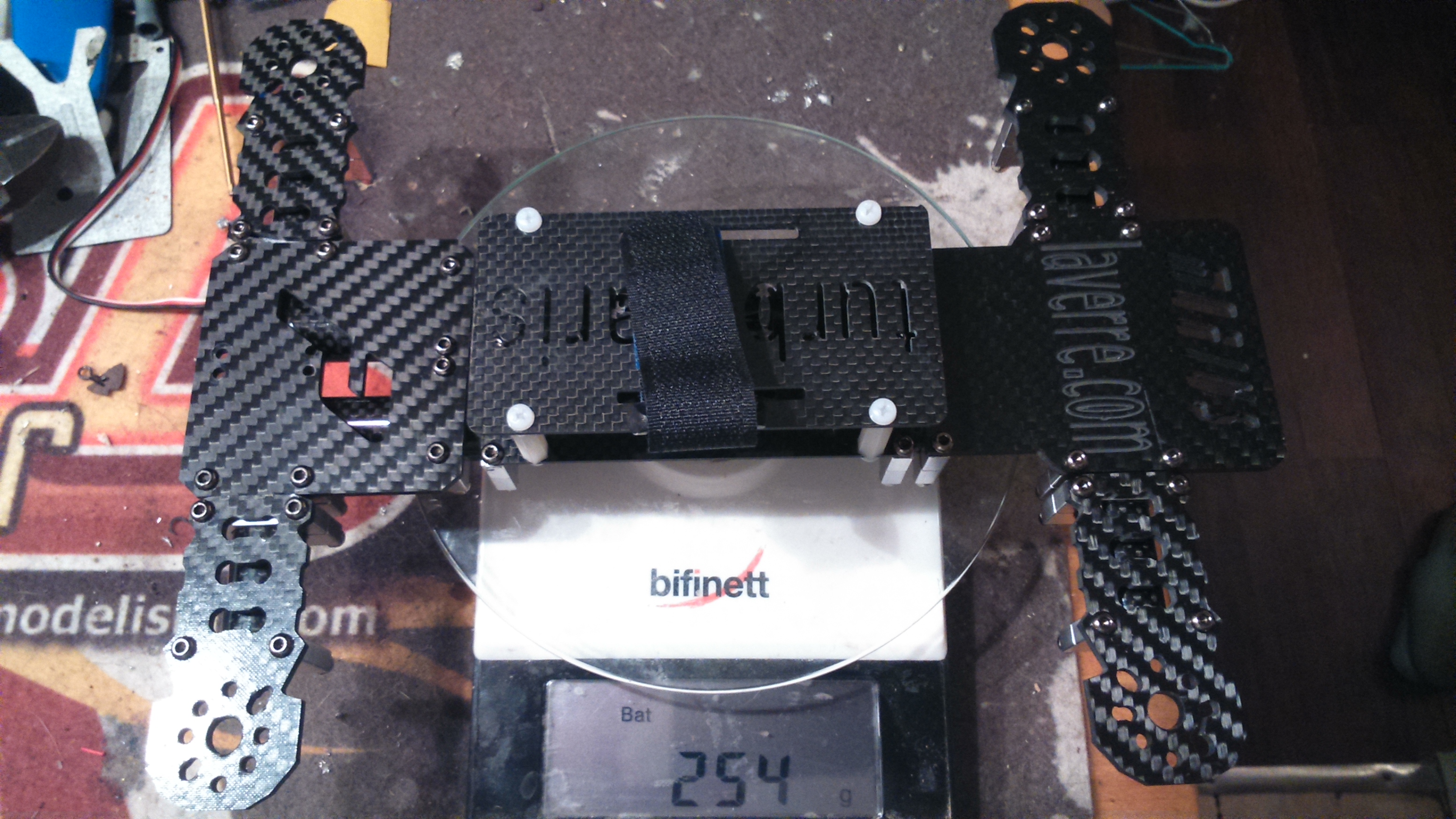
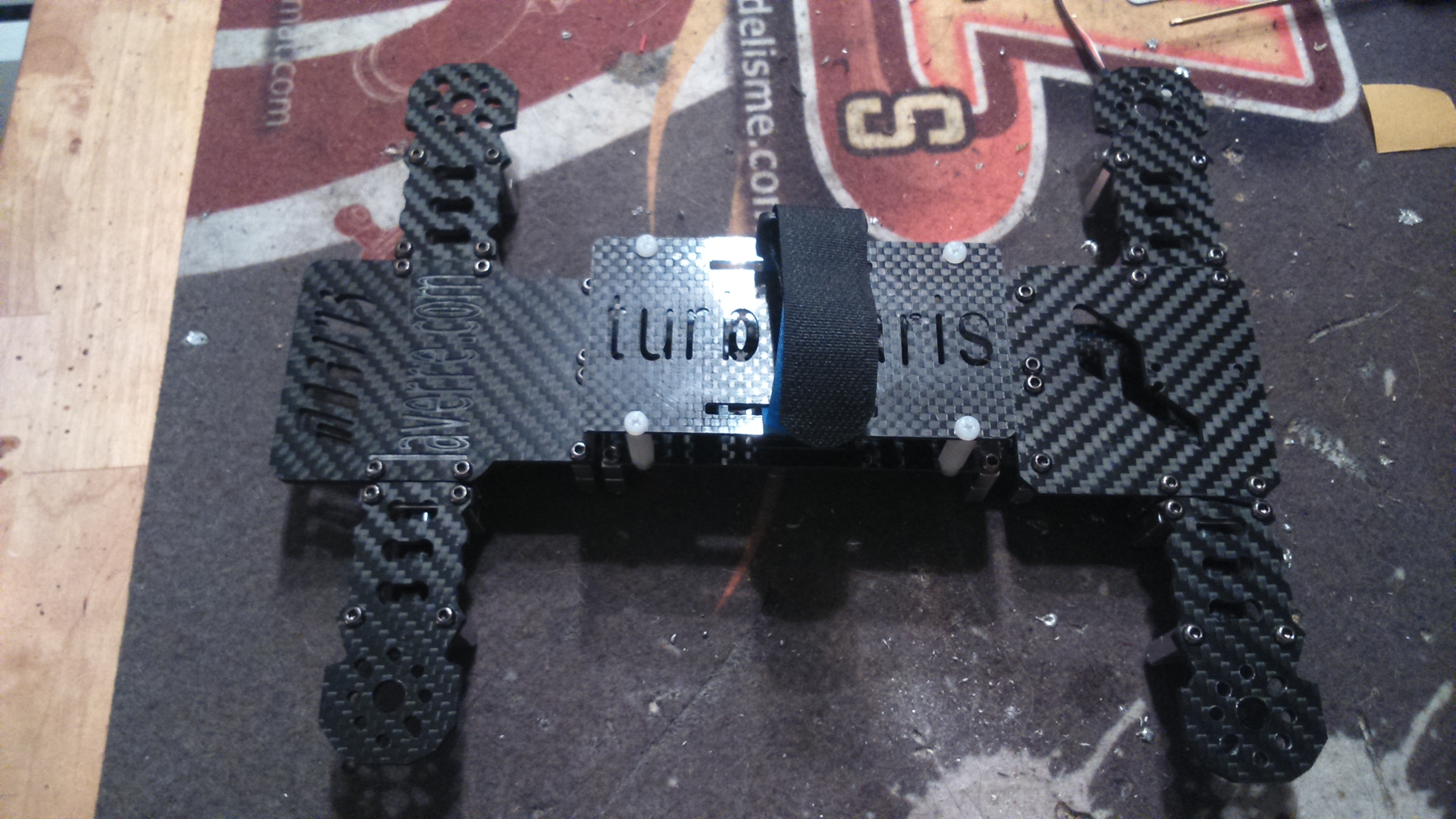
Le montage commence à blanc, presque toutes les pièces sont imprimées.
Il ne reste qu’à recevoir les bonnes vis et les roulements à aiguilles, à couper les tubes carbones à la bonne taille.


Le montage commence à blanc, presque toutes les pièces sont imprimées.
Il ne reste qu’à recevoir les bonnes vis et les roulements à aiguilles, à couper les tubes carbones à la bonne taille.
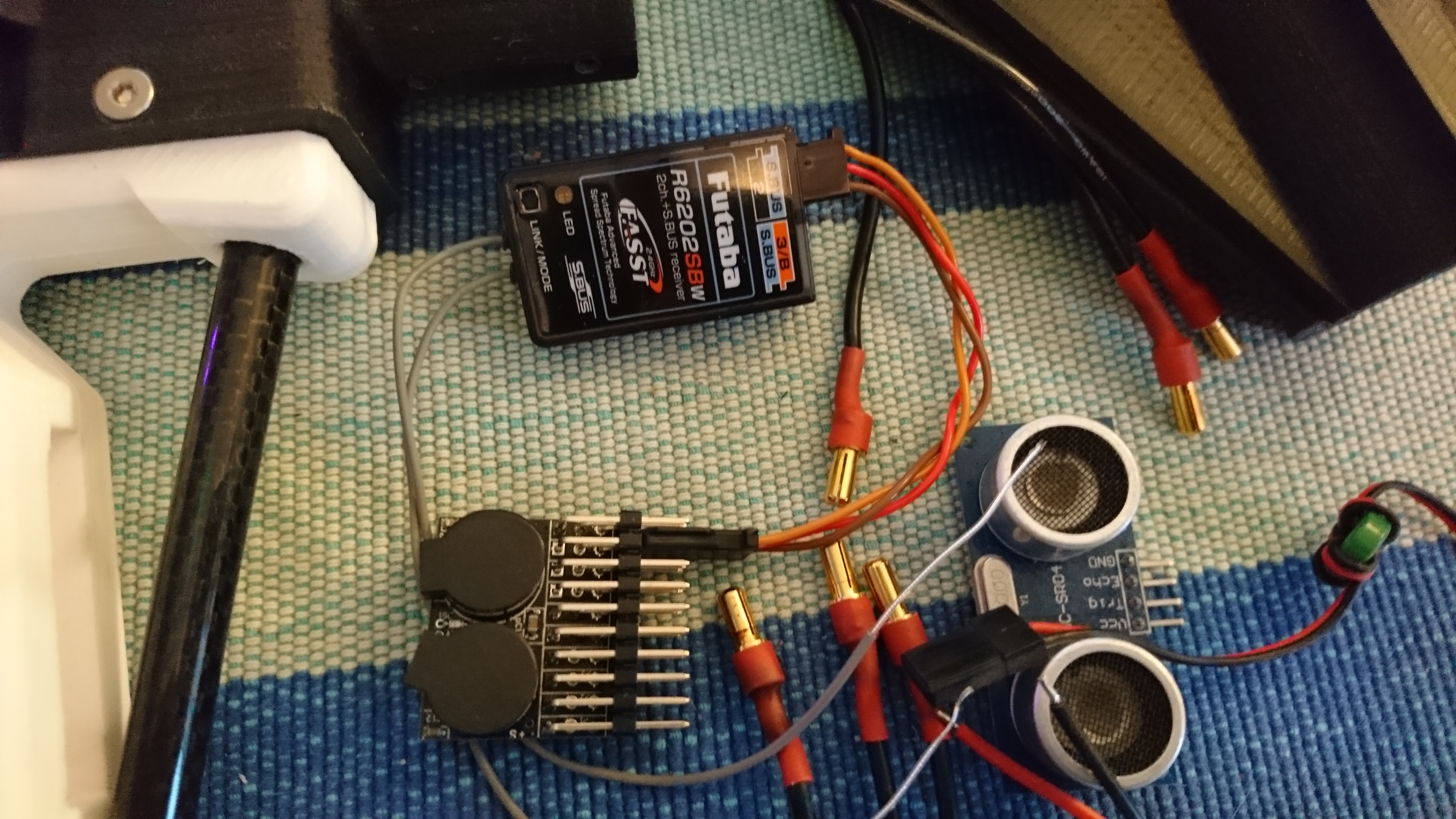
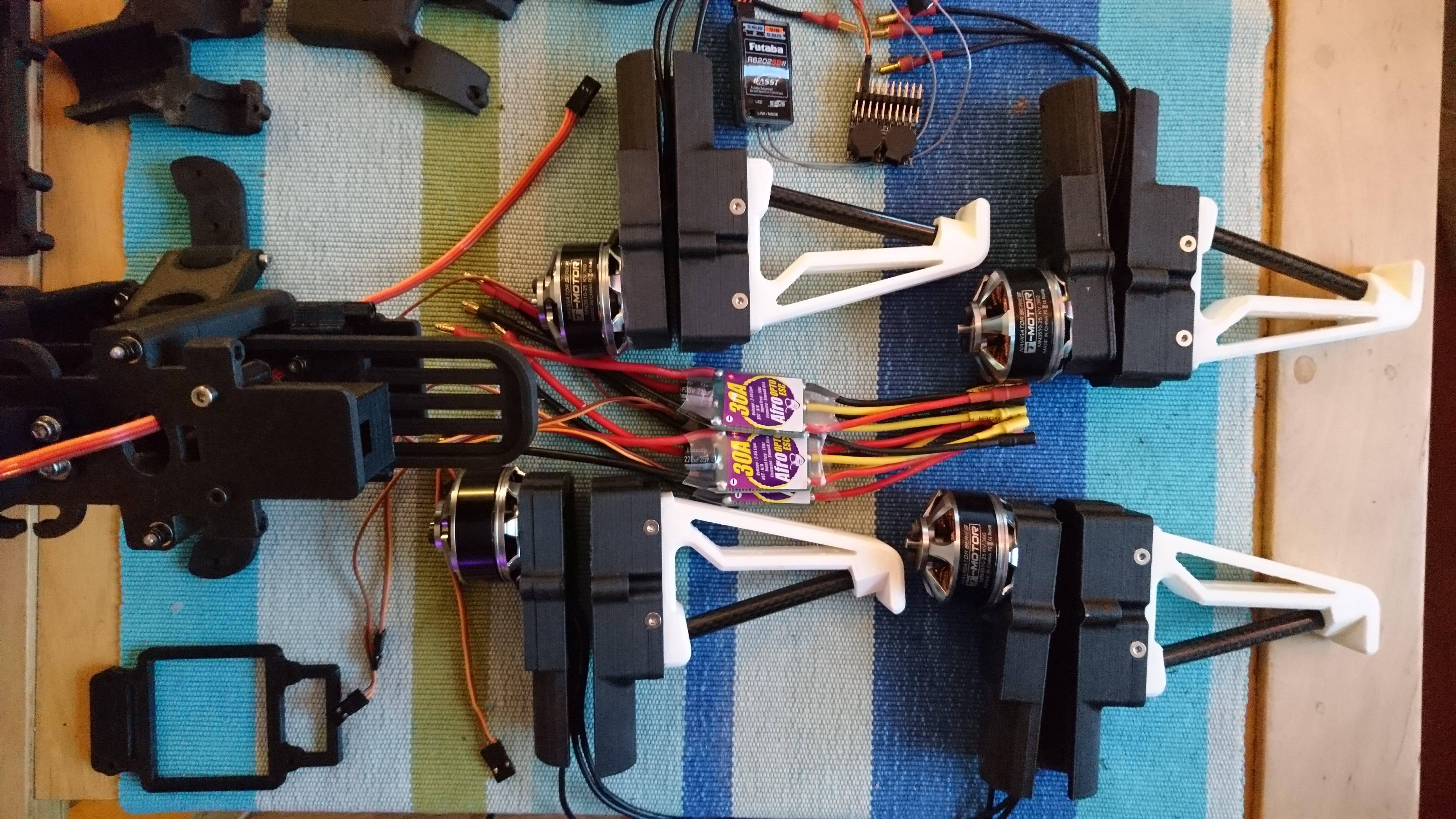
Voici la liste des matériels qui sera sur la machine Inspired.
Contrôleurs de vol: Pix4 ou Pixhawk ( ICI )
Motorisation: 4 x T- Motor MN3510-25 360KV ( ICI )
Esc: Afro ESC 30Amp OPTO Multi-rotor Motor Speed Controller (SimonK Firmware) ( ICI )
Hélices: 4 x RC timer 16x 5.5
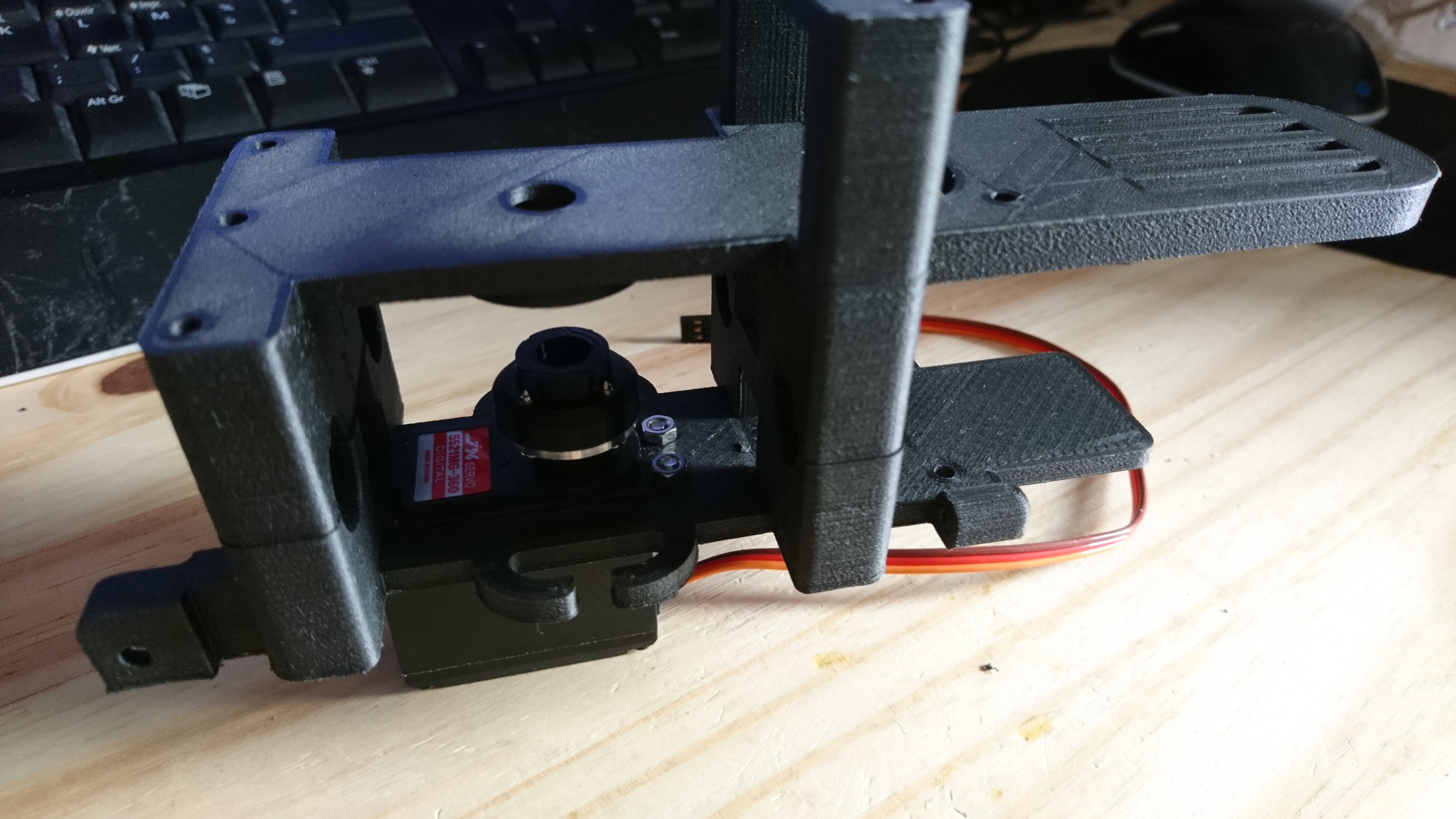
Servo 360° pour le train, et un Arduino pour le contrôler.
La batterie d’accumulateurs sera en 4s, j’espere pouvoir monter les batteries 10A/h
Pour la coque:
http://www.studiosport.fr/lot-2-bras-renforts-lateraux-dji-inspire-1-p-5029.html
http://www.studiosport.fr/fuselage-superieur-dji-inspire-1-p-5000.html
http://www.studiosport.fr/fuselage-inferieur-dji-inspire-1-p-5001.html
http://www.studiosport.fr/nez-dji-inspire-1-p-5023.html
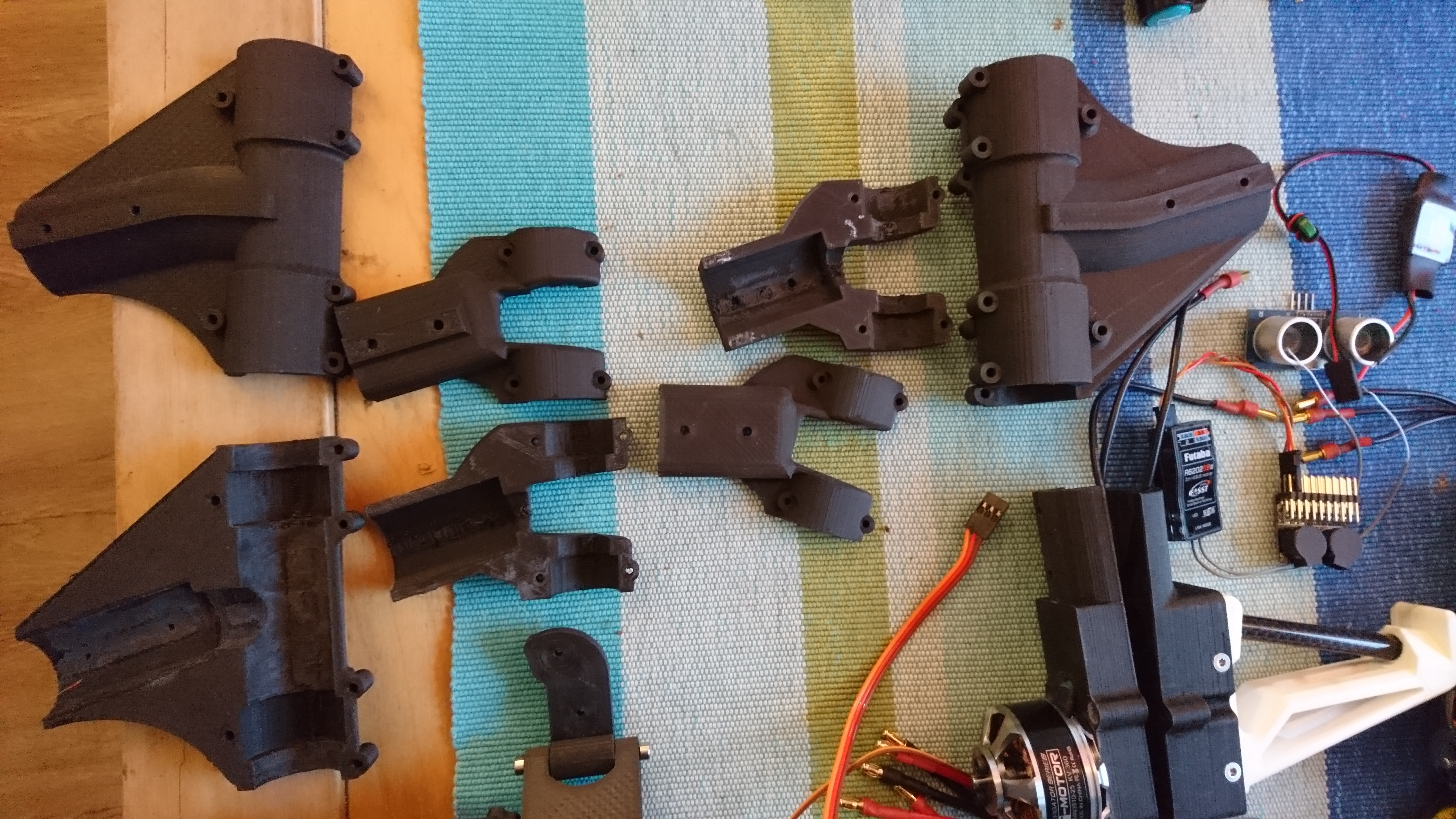
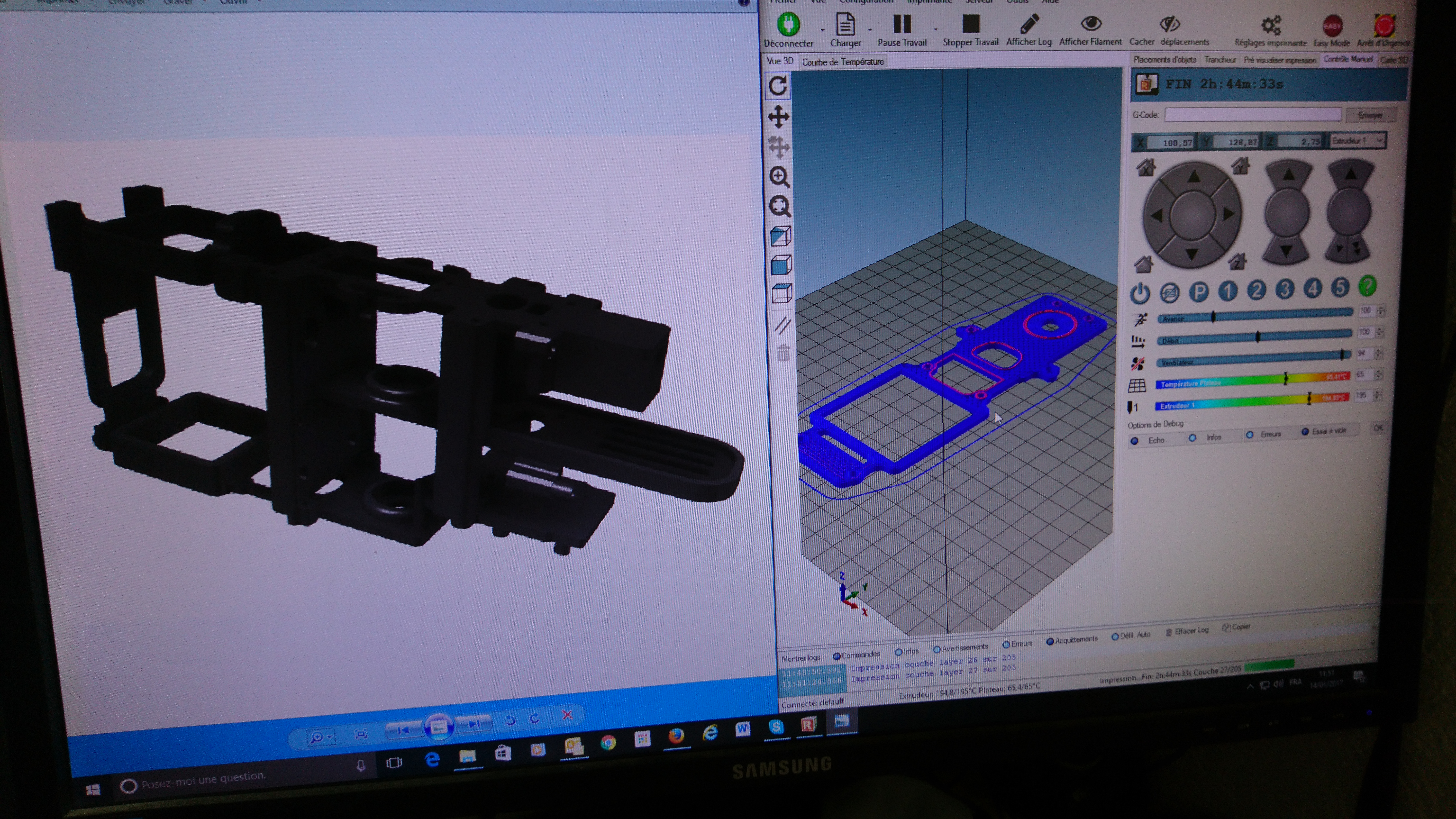
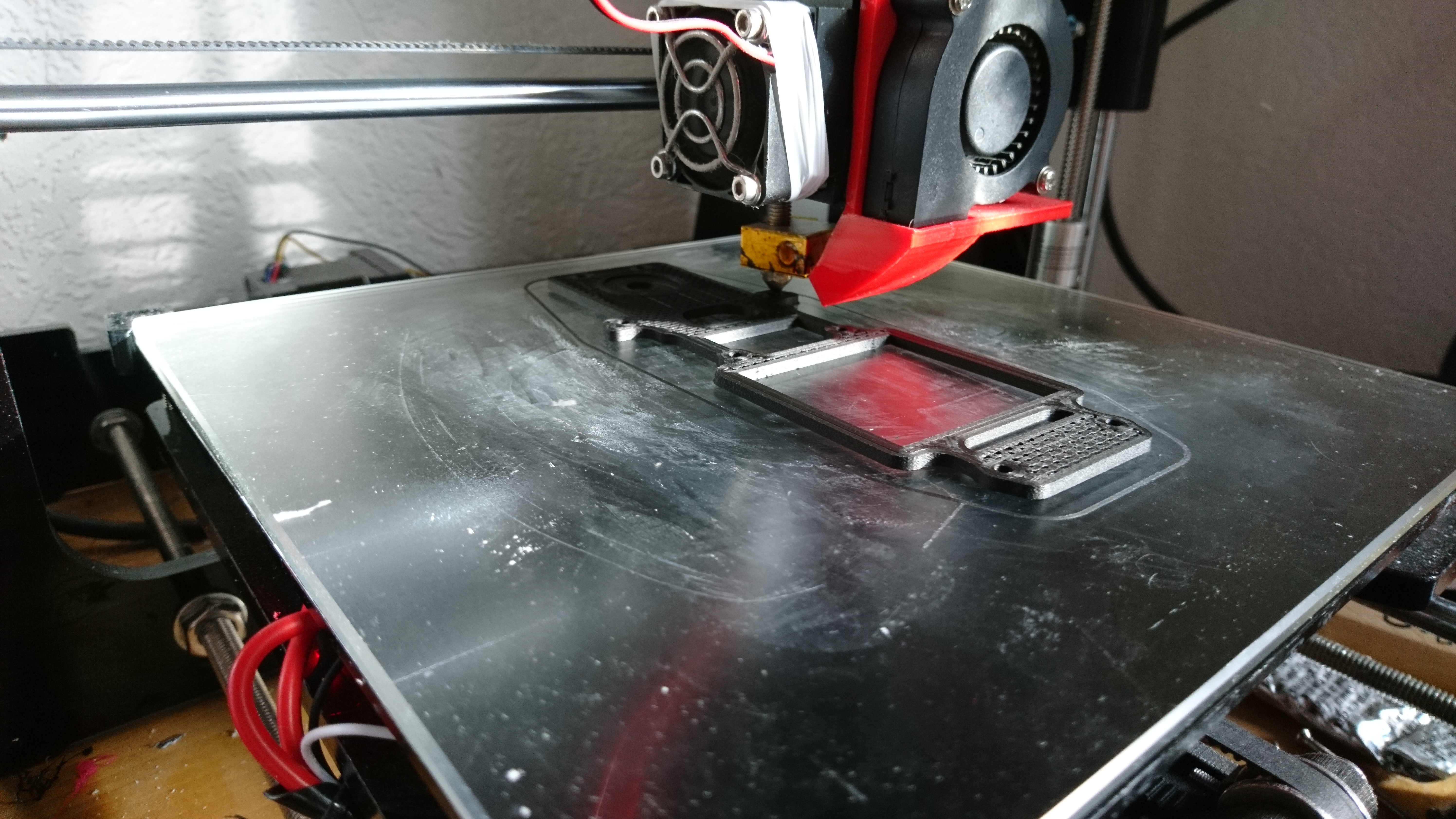
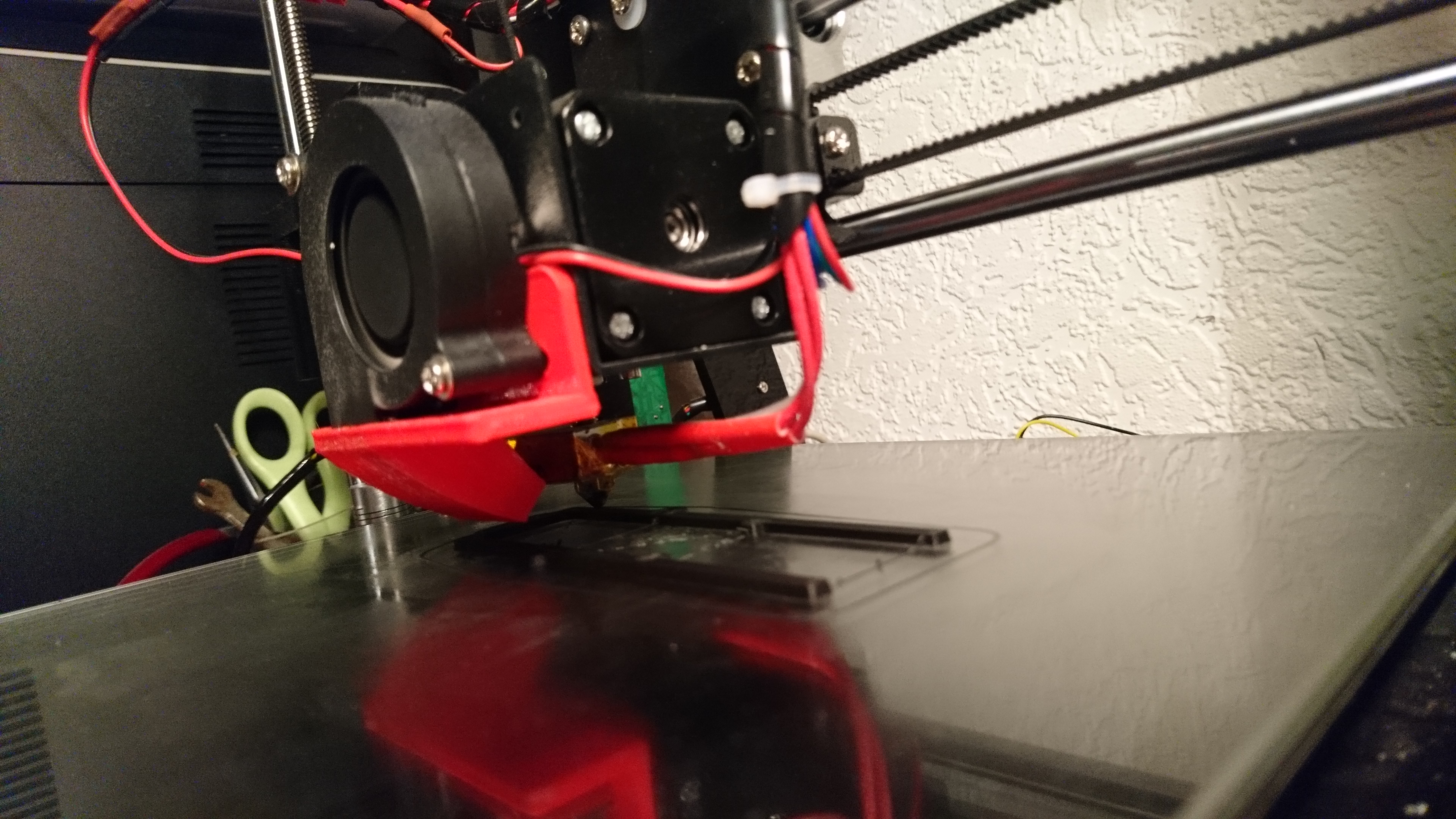
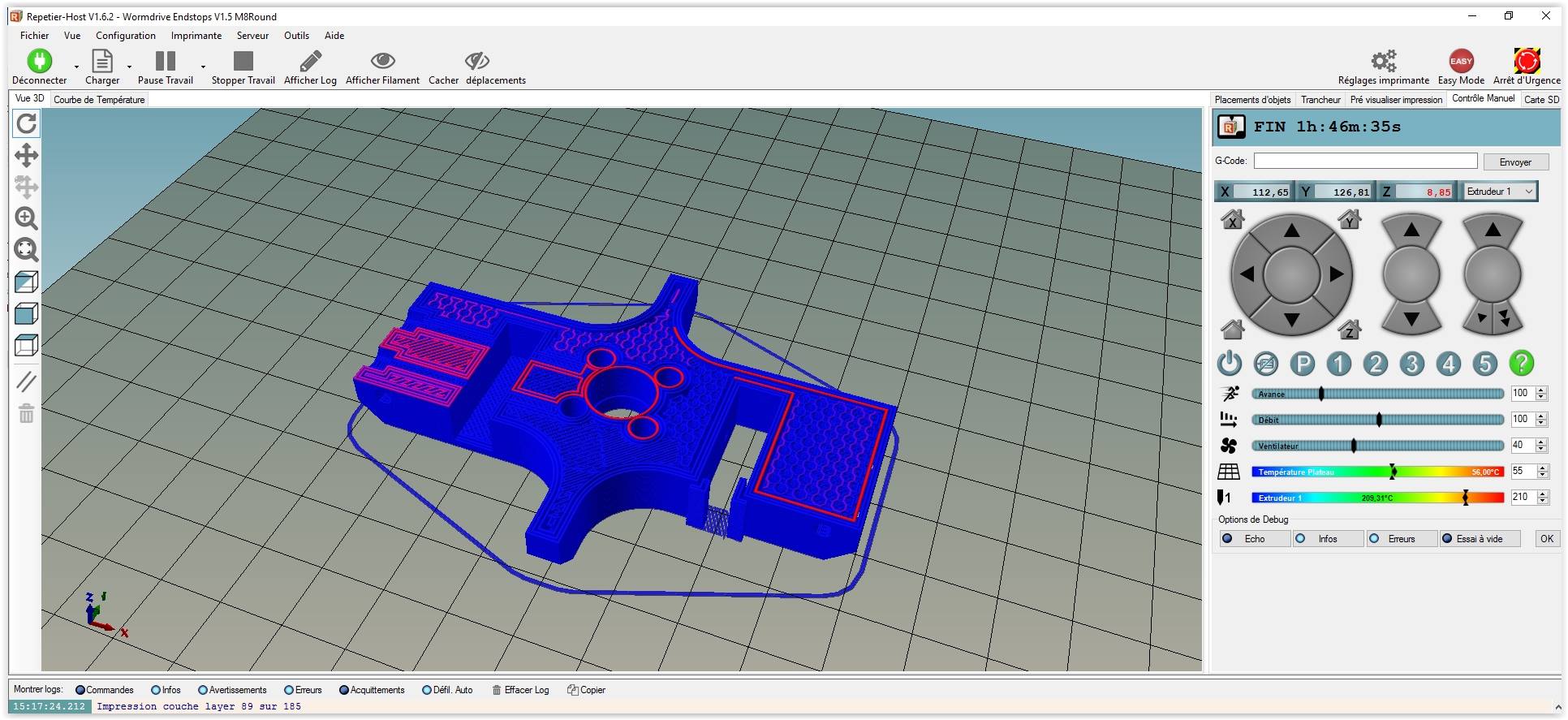
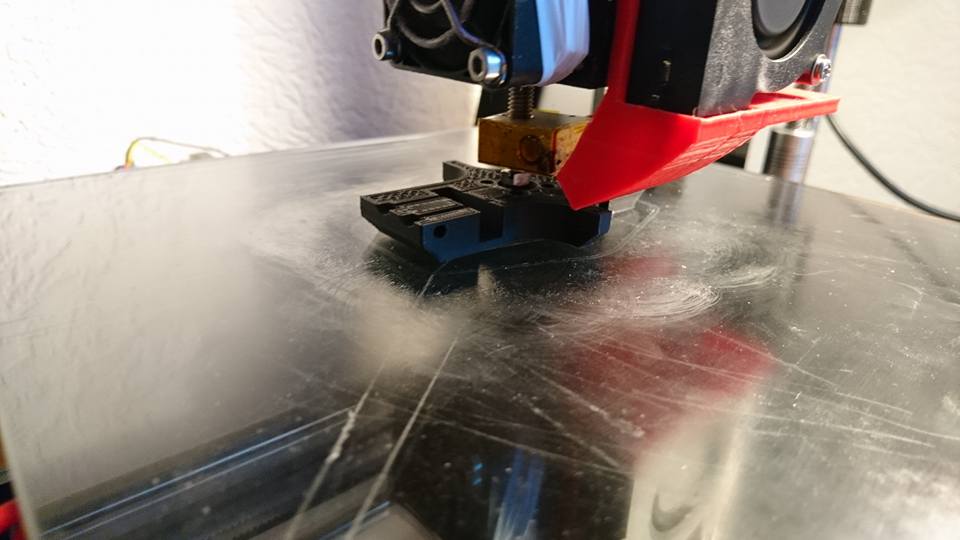
Je continue à imprimer , et c’est beau.
J’utilise du filament Proto-Pasta de chez ProtoPlant . C’est un PLA renforcé à 15% de fibre de carbone (Acheté ICI ).


Copier ce qui existe, oui et grâce à l’impression 3d tous devient possible.
Le Dji Insipre est une très belle machine mais d’un prix hors norme.
J’ai dans le bureau pas mal d’équipement me permettant (en théorie) de monter une belle grosse machine.
Des hélices de 15pouces, des moteurs qui vont avec, une Pixhawk que je teste et qui vole depuis quelques jours (enfin)… du tube carbone Diamètre 22mm.
Donc un mix de 2 projets Thingiverse devrait voir le jours cette année:
http://diyrc.co.uk/3d-printed-inspire-clone/ : ici la version 1.4 me plait bien enfin les pieds sont sympa, il reste juste le les support moteur a redesigner
Et me voila lancé dans l’impression de quelques pièces

@ suivre
Je suis en court de paramétrage d’une carte Flip32 (copie des naze32), avec le soft cleanflight.
Je me suis heurté a un soucis d’utilisation du Sbus.
Il faut un » Sbus inverter » :
http://www.banggood.com/DALRC-NAZE32-Flight-Control-SBUS-Signal-Inverter-for-RC-Multicopter-p-1021118.html
Ou
http://www.hobbyking.com/hobbyking/store/__52185__FrSKY_SBUS_to_CPPM_Decoder.html
Après recherche et une bonne assistance d’une connaissance, voici ce qui en sort:
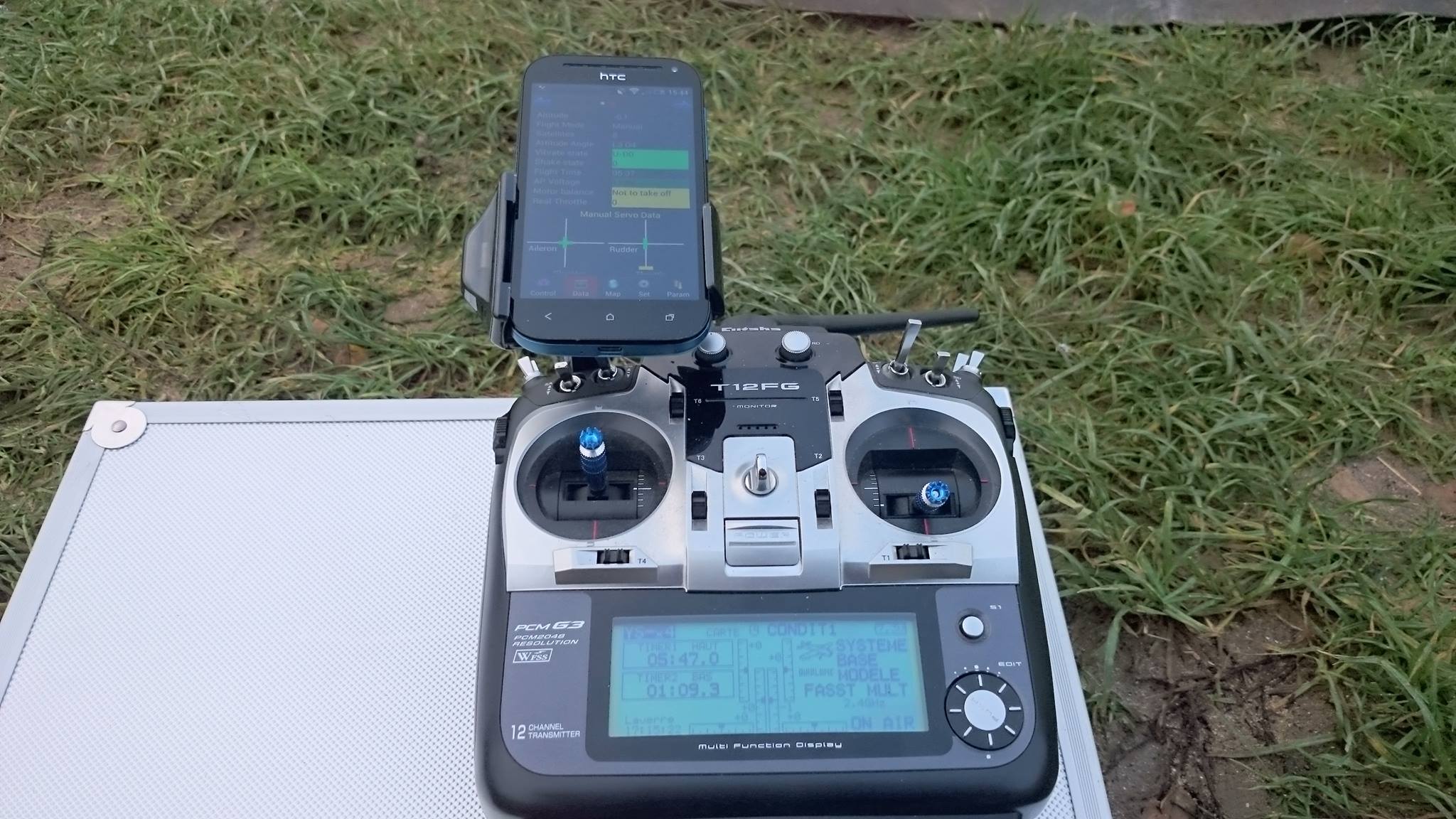
Vole du 18 Aout, en Normandie au dessus de la maison Familiale, et teste en mode autonome (vole par point gps):
Session du 26 juillet 2014:
Petite session dernière semaine de Mai:
Premier vole de mon hexarotor, baptisé « SuperBUS ».
La carte de contrôle est la Zero-uav YS-X6
Moteur T-motor MT3506-25
Hélices 11 pouces
Accus Zippy 8A/h 4s
Autonomie record pour moi, 14min…
Essai de nacelle sur quadri rotor
Quadri Rabbit par laverre.com
Vidéo
Vol embarqué Sept-Vents par laverre
Petit petit petit.
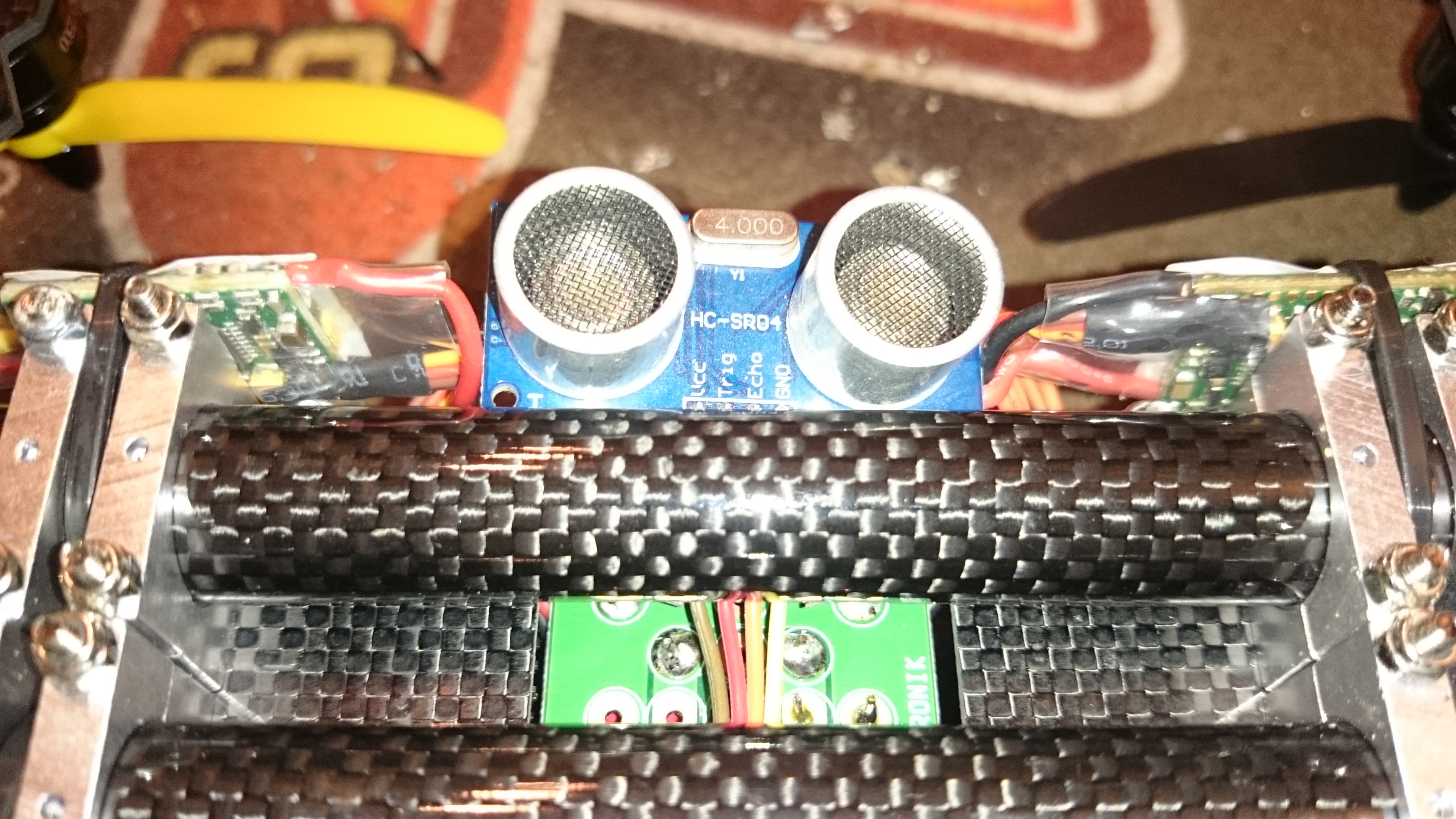
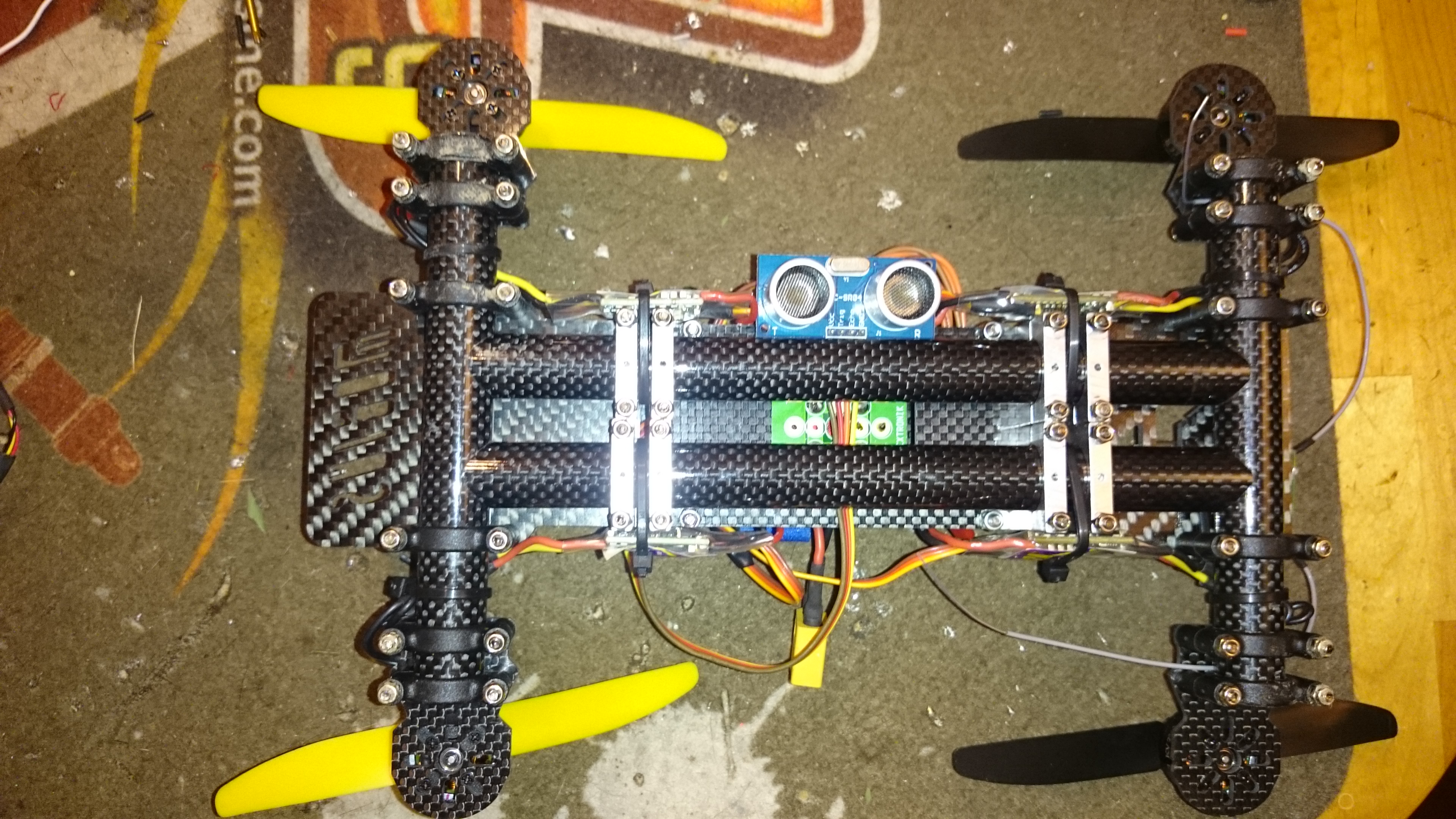
Oui un châssis de 250 est en cours de montage.
Un 250 c’est quoi?
C’est un châssis de 25 cm de diagonal moteur.
A quoi cela sert?
A rien c’est du modélisme… mais je vais l’utiliser pour faire du low-riding (voler vite a basse altitude, comme dans la course de POD star wars).
une carte de contrôle naze32 full
des ESC 12A des hélices 5″
surement une ou 2 led pour faire joli.
Et surement une légère cure amaigrissement car je le pense un peu lourd (mais bon dans la vie, il y en a qui sont lourd et on fait avec…)
















Depuis noël je suis sur un hexacopter, je l’ai baptisé « SuperBUS »
La carte de contrôle: Zero-uav YS-X4
Les Moteurs: T-motor MT3506-25 avec des Esc 30A flashé Simonk
Hélices: 11 pouces Graupner ou 13 pouces T-motor (1355)
Accus: Zippy 8A/h 4s
Je suis a plus de 3Kg dans cette configuration.

La nacelle est une Brushless avec une carte de control Simple Brushless
Gimbal Controller, peu évidente a configurer, mais une fois fait, c’est une vrai bonheur.



Je viens de monter des LED sous les moteurs, l’intérêt est de reconnaitre l’avant de l’arrière, mais aussi en cas de basse tension de l’accu, le système clignote .




Je vais tenter de poster ici les évolutions que je fais de la Notice en Français pour les cartes de Zerouav.
La notice de la carte YS-X4 Carte de Vol YS-x4 fr


Utilisation du soft Androïd en Français Annexe 3 gcs
Notice de l’OSD de Zerouav OSD-USER-MANUAL-EN-V1.2 français
Voici déjà la VF pour la mise a jour du Firmware: ICI
ICI une traduction du Hard reset du module wifi A utiliser avec précaution!
Je suis preneur des erreurs que j’ai pu faire dans ces notices
@ Suivre
Essai de capture vidéo en 4k, décembre 2014:
Session du 26 juillet 2014:
Petite session dernière semaine de Mai:
Premier vole de mon hexarotor, baptisé « SuperBUS ».
La carte de contrôle est la Zero-uav YS-X6
Moteur T-motor MT3506-25
Hélices 11 pouces
Accus Zippy 8A/h 4s
Autonomie record pour moi, 14min…
Essai de nacelle sur quadri copter
Quadri Rabbit par laverre.com
Vidéo
Vol embarqué Sept-Vents par laverre