L’aventure du Multi WII, avec une carte AIOP V2.0 ALL IN ONE PRO…
Ça a commencé sur la plage:

Là, commande de module Bluetooth et d’un gps U-Blox LEA 6H a bien vite suivi.
Le début des choses fun …
—-
Une installation du soft arduino (pas trop dur: http://arduino.cc/en/Main/Software )
Le téléchargement du multiwii 2.2 ( https://code.google.com/p/multiwii/downloads/list/ )
Après avoir brancher la carte au pc, on commence dans la soft Arduino pardonner le petit nom du bon arduino: mega 2560 , et le bon port com
nettoyer tout: Fichier, exemple, eprom, clear.
puis ouverture du .ino disponible dans le répertoire multiwii, télécharger précédemment.
on va sur l’onglet config.h, et on paramètre la carte, c’est moi pour le moment, cela donne cela: config.h
il va surement évoluer ce fichier… pour le petit quadri mule (une copie de dji 450) en config X.
Info découverte ce matin un assistant de configuration du fichier: http://panoramaic.se/configurator/
puis Vérifier et enfin si la compilation est bonne, faire Téléverser .
—-
Une installation des maj de java (vital pour le fonctionnement du multiwii conf)
et lancement de multiwii conf 32 bits même si comme moi on est en win 7 64 …parfois je cherche pas a comprendre
Viendra plus tard le paramétrage du gps, avec le soft u-blox ( http://www.u-blox.com/en/evaluation-tools-a-software/u-center/u-center.html )
Le fichier a upper dans le gps: u-blox-config.ublox
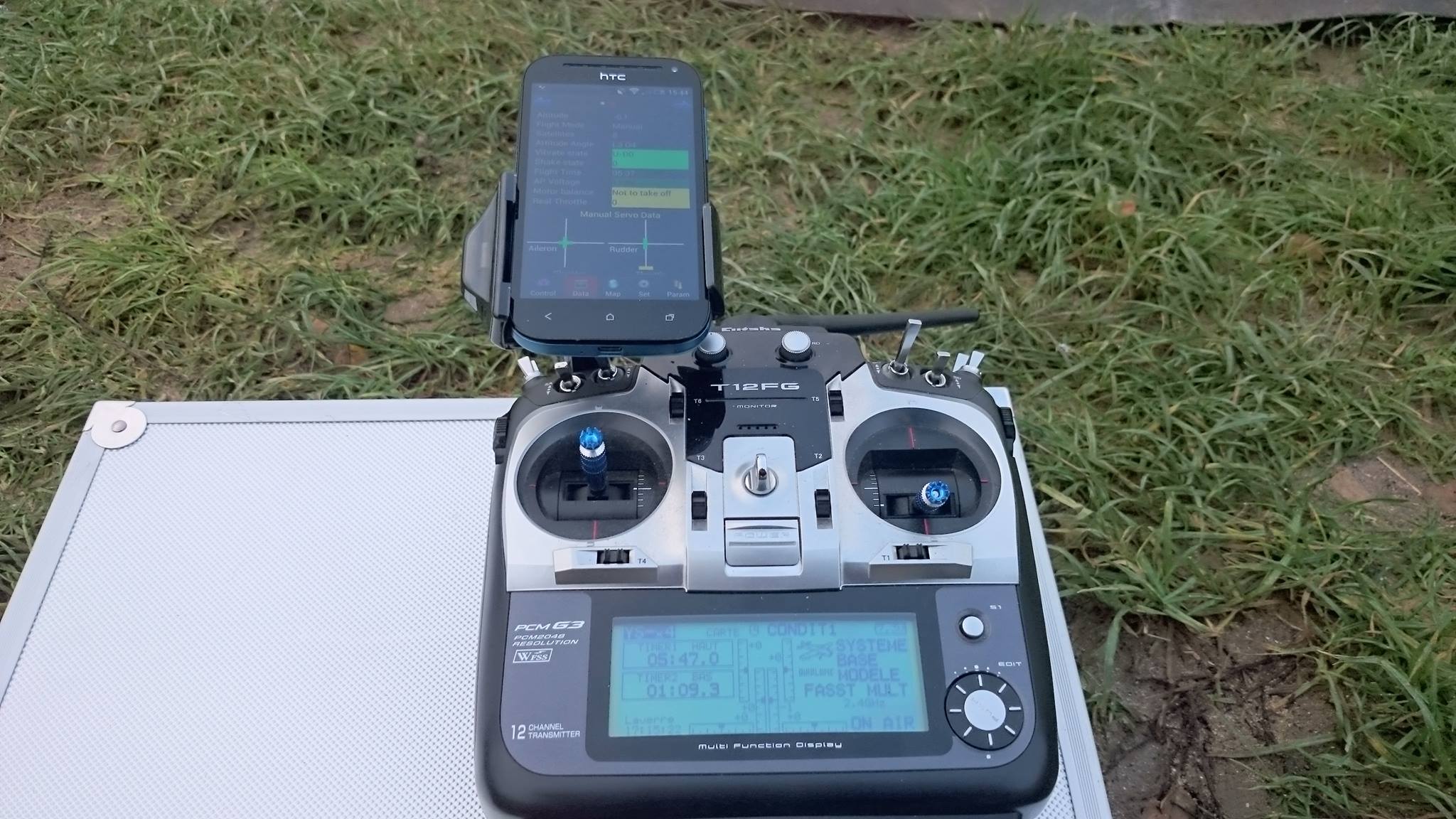
Le soft sur Android, pour exploiter le tous ( https://play.google.com/store/apps/details?id=com.ezio.multiwii )
@ suivre