Le voila arrivé à la maison moins d’une semaine après l’annonce de Dji: Le Mavic 2 Zoom.
Pourquoi avoir choisi le modèle Zoom plutôt que le Pro?
Question de prix, le zoom un peu moins chère, et depuis que je met des cameras sur les machines volantes (avion ou/et multirotor) le zoom me manque. Donc le chois a été rapide, le modèle Zoom.
Les spécifications: https://www.dji.com/fr/mavic-2/info#specs
Place aux images:




La radio sans manche surprend au premier abord. 
Mais en faite les sticks ce devisent et se logent en dessous (une tres bonne idée surtout que Dji nous en met une paire en plus dans la boite en cas de perte).


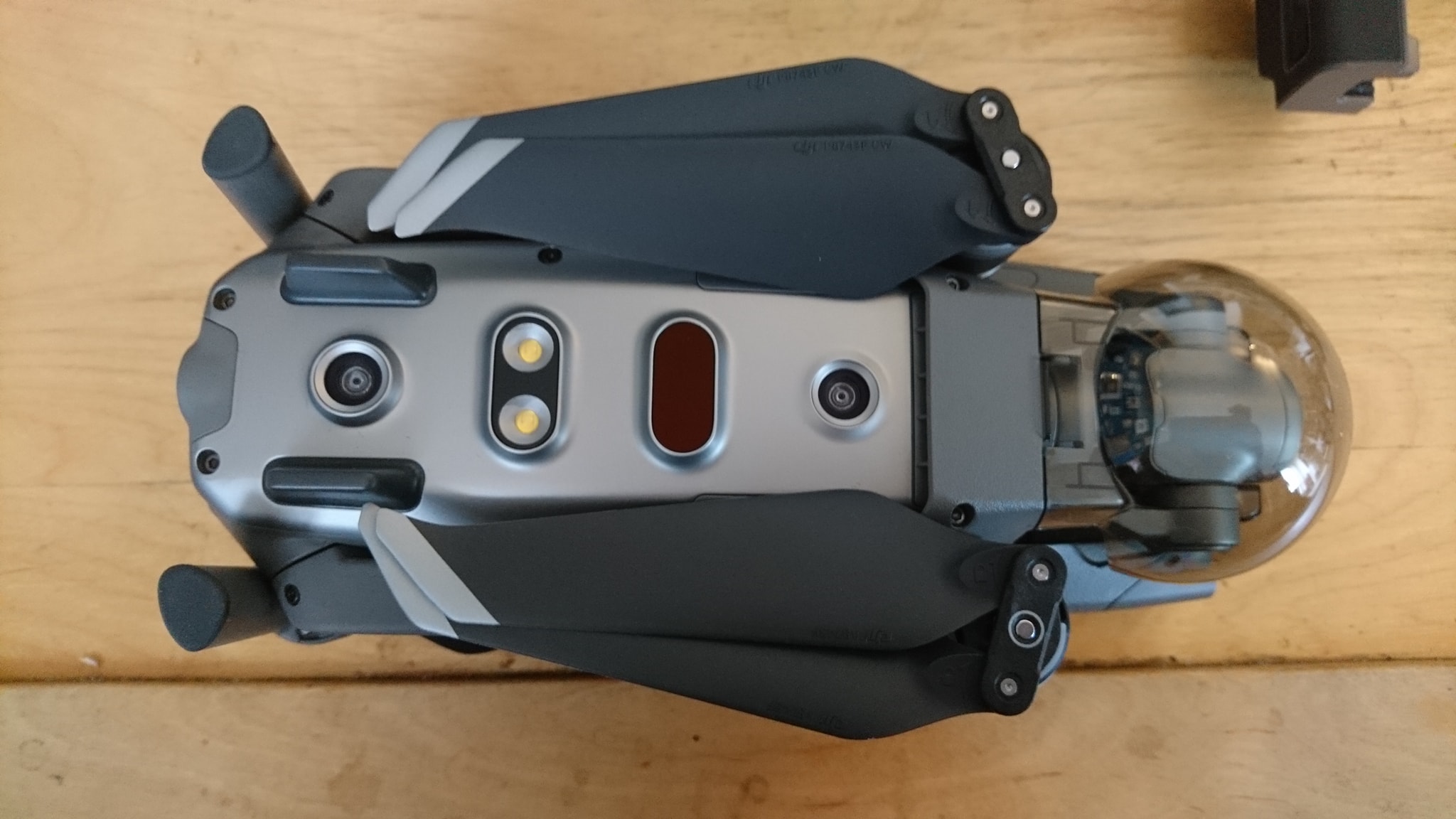
Place au comparaison de taille entre un Mavic Pro (V1 à Droite) et le Mavic 2 Zoom (à Gauche)





Différence de taille: La nacelle plus grosse est bien la nouvelle, mais elle a bien plus de débattement ( environ 180°)

Merveille il rentre avec toute ses petite affaire dans mon sac de reflex ( que je n’utilise plus).