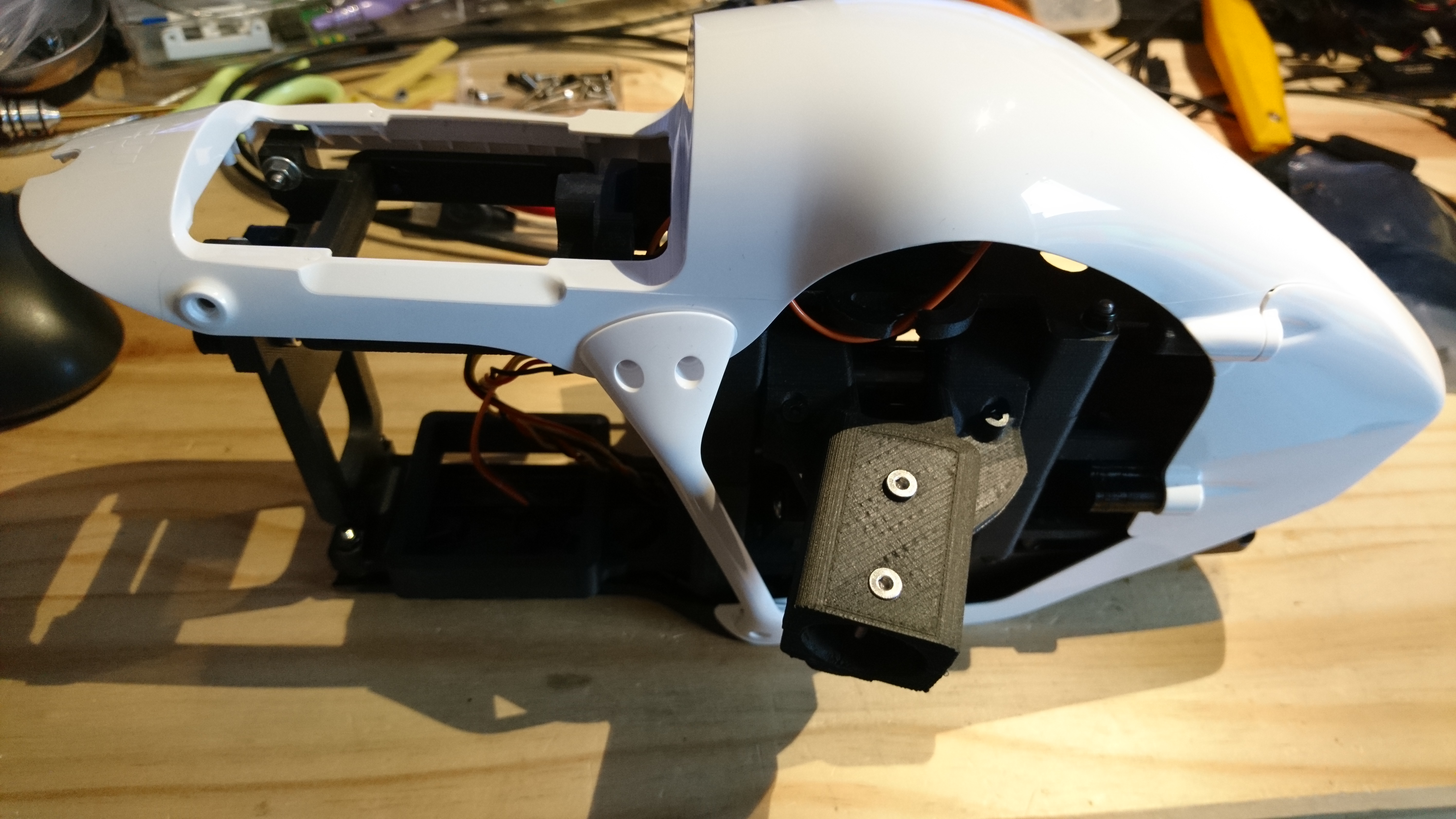
L’assemblage continue doucement et une jolie coque vient de lui être pausée.
Le modélisme, Aéro et naval.
L’assemblage continue doucement et une jolie coque vient de lui être pausée.
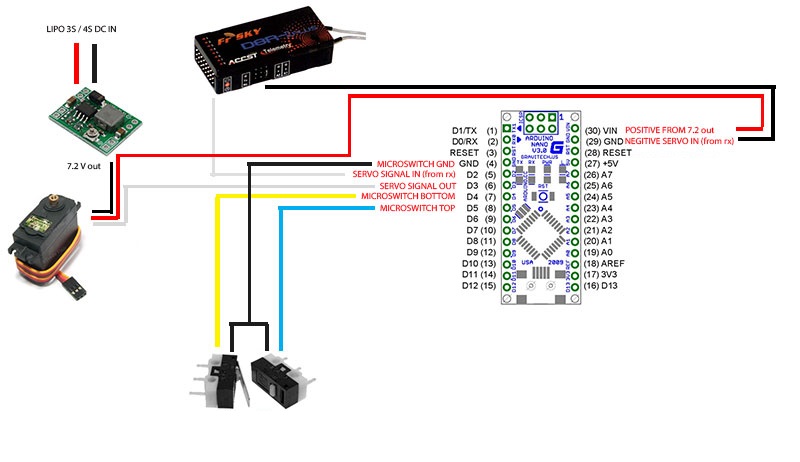
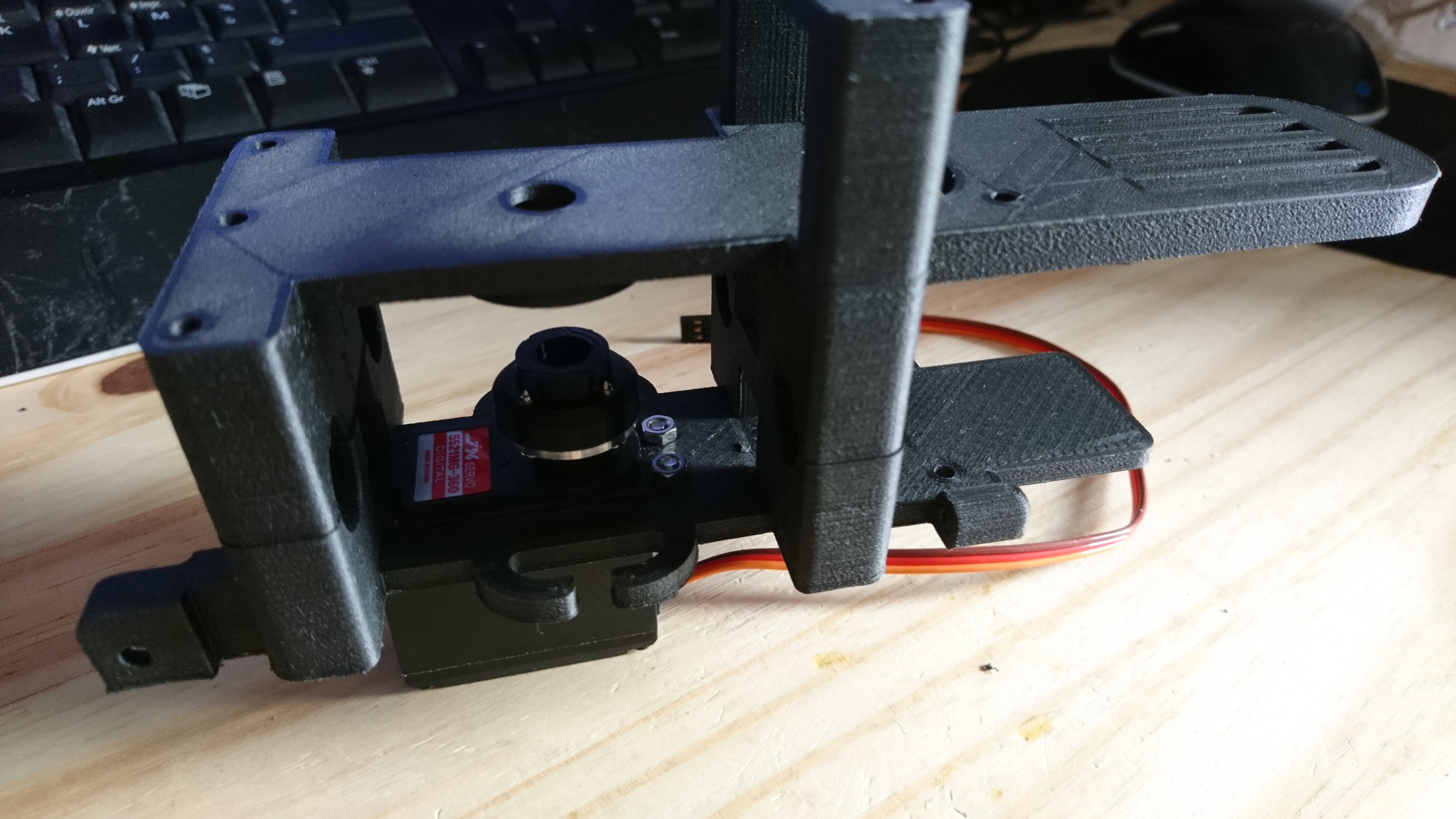
Pour piloter le train d’atterrissage , la solution que je souhaitais était d’utiliser un servo 360° que j’ai dans un coin, et des fins de course (haut et bas) afin de rendre le tout le plus facile à dépanner.
L’utilisation d’un arduino nano me semblait une évidence vu le coup faible du produit( Banggood ici ).
Un fin de course haut, un bas afin de piloter l’arrêt du servo, le dessin est clair dans ma tête, mais ne maitrisant pas la programmation…
je me suis mis en tête de trouver un code sur le web.
Les bibliothèques sont disponible sur le web, et l’utilisation du logiciel Arduino plus ancien ( 1.0.5-r2) a été nécessaire pour pour faire tourner le sketch .
Voici une évolution grâce à Fred qui a réalisé le code arduino:
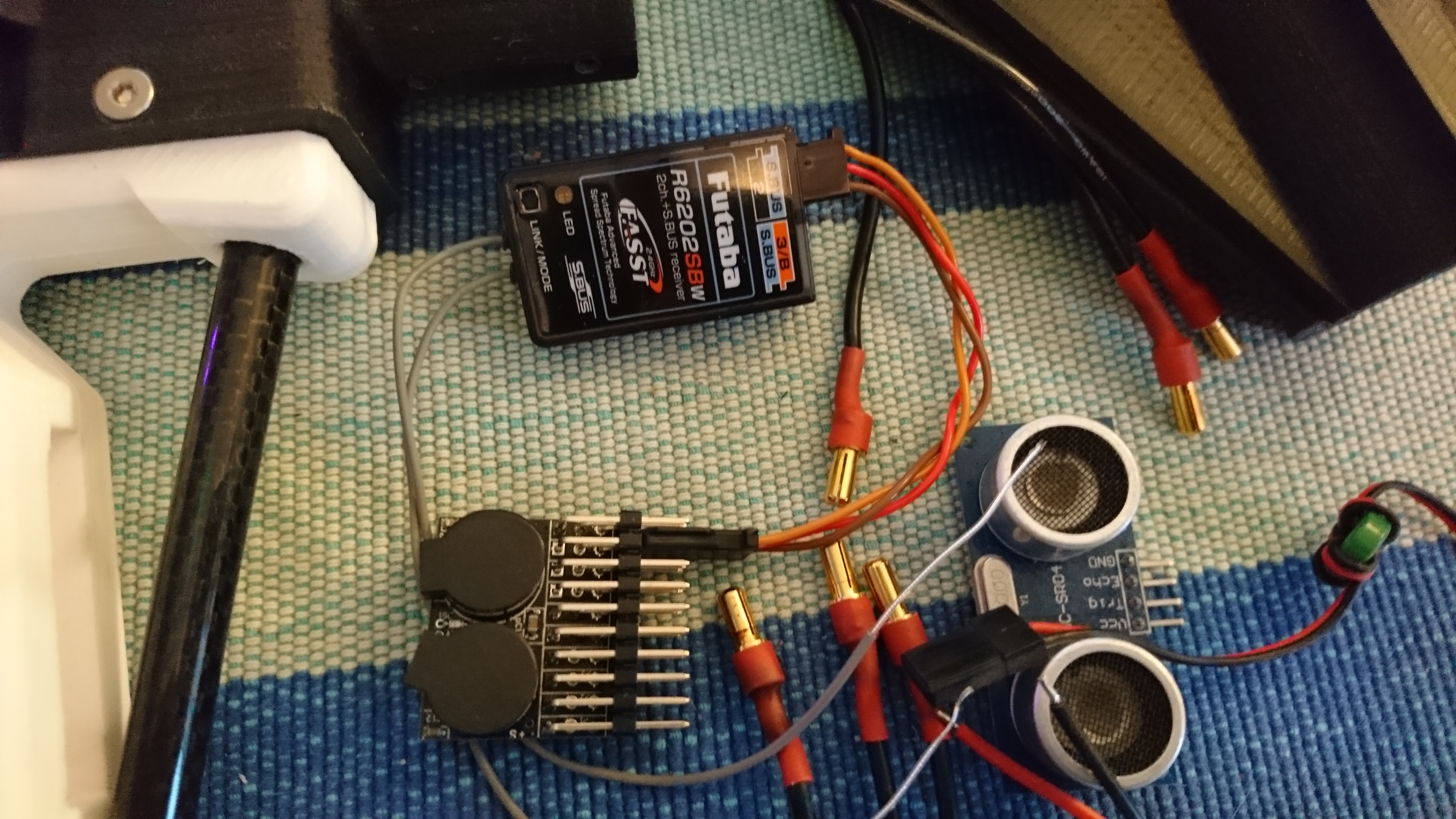
L’utilisation du capteur ultrason. Lorsque le switch 3 position de la radio sera sur la position centre, rend le système automatique. Si machine au dessus de 2m alors on monte le train, si la machine est en dessous de 2m on baisse le train. Et toujours la possibilité de forcer le système par la mise en position du switch en position haute ou basse.
Le fichier ino que j’utiliserais: train-rentrant.ino
Et ci dessous le dessin de câblage
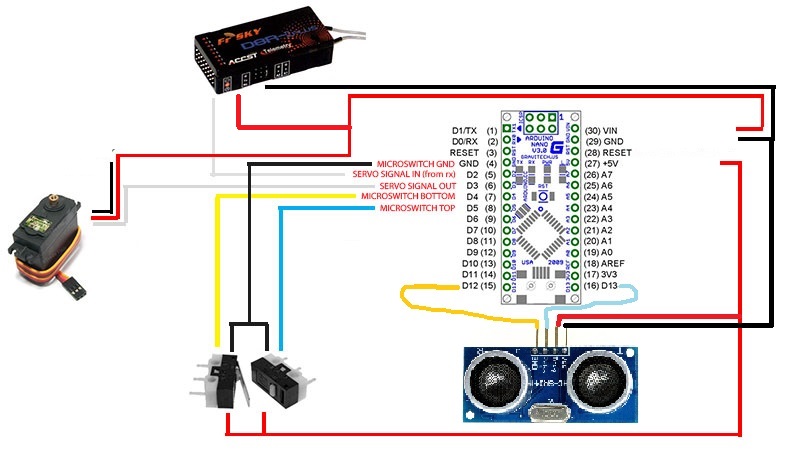
—Pour le moment—
Pour le moment je fonctionne plus ou moins (car j’ai un soucis de servo) sans le système à ultrason et avec un câblage un peu différent:
 et avec ce code que je doit nettoyer …
et avec ce code que je doit nettoyer …
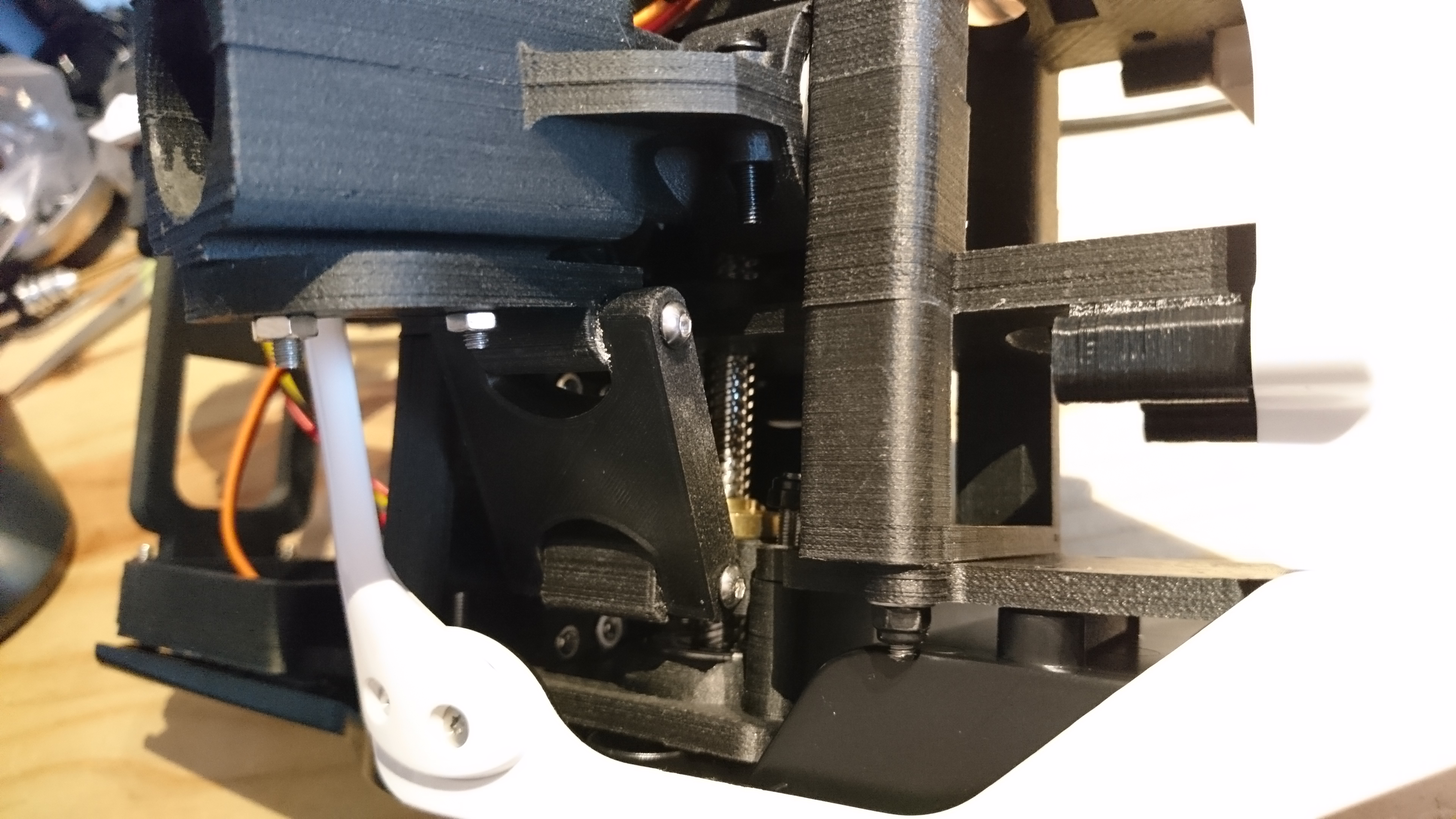
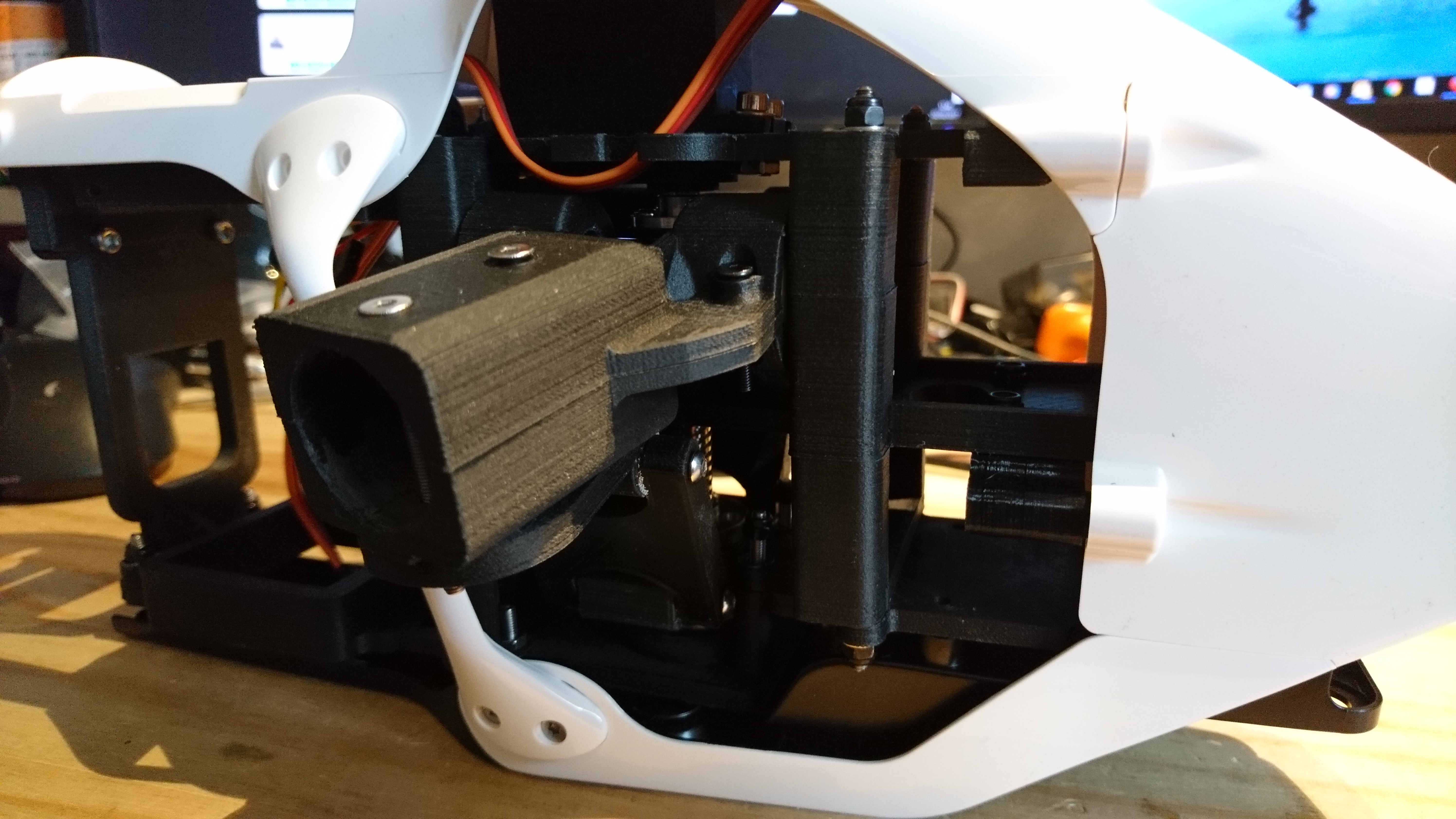
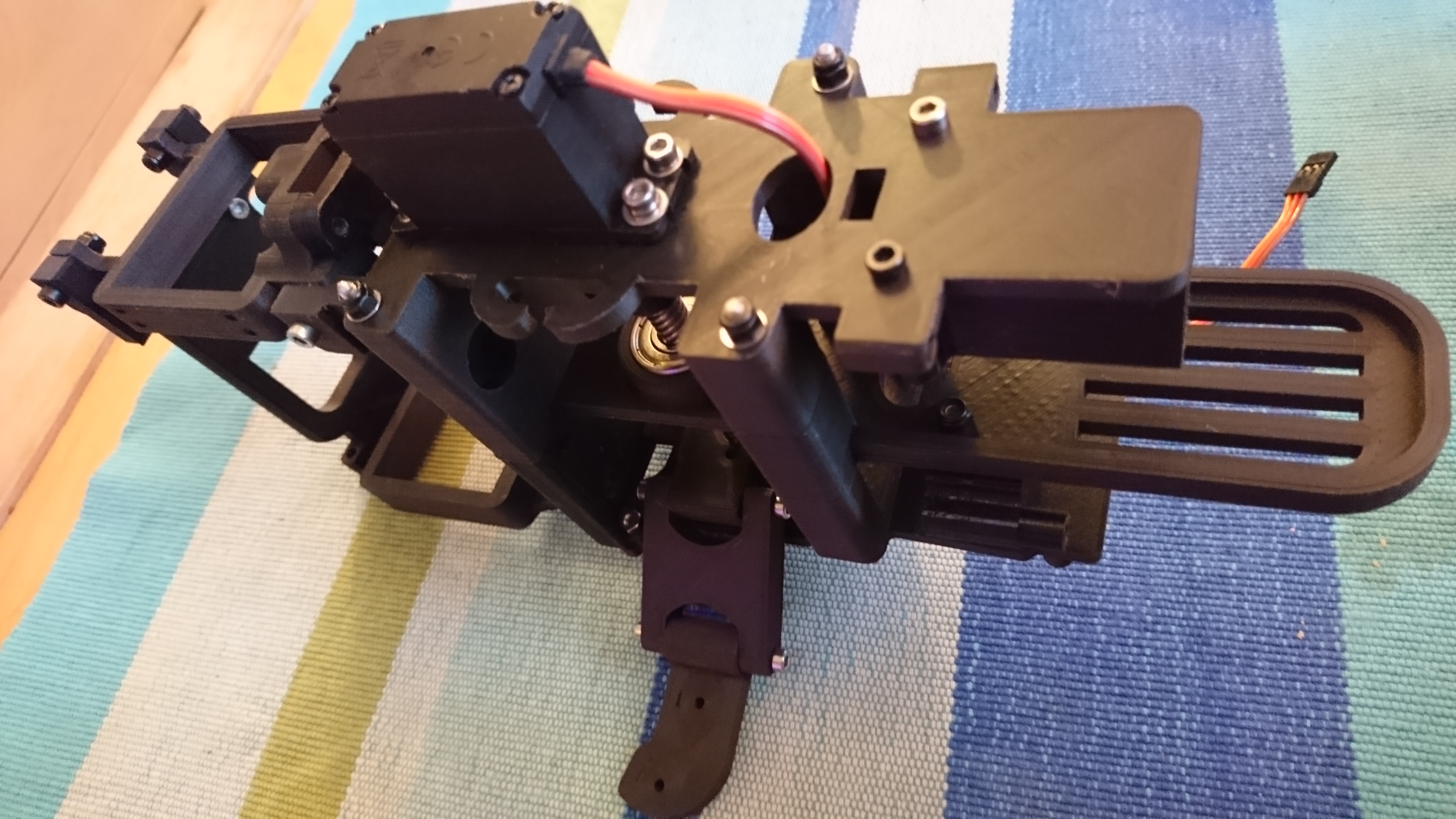
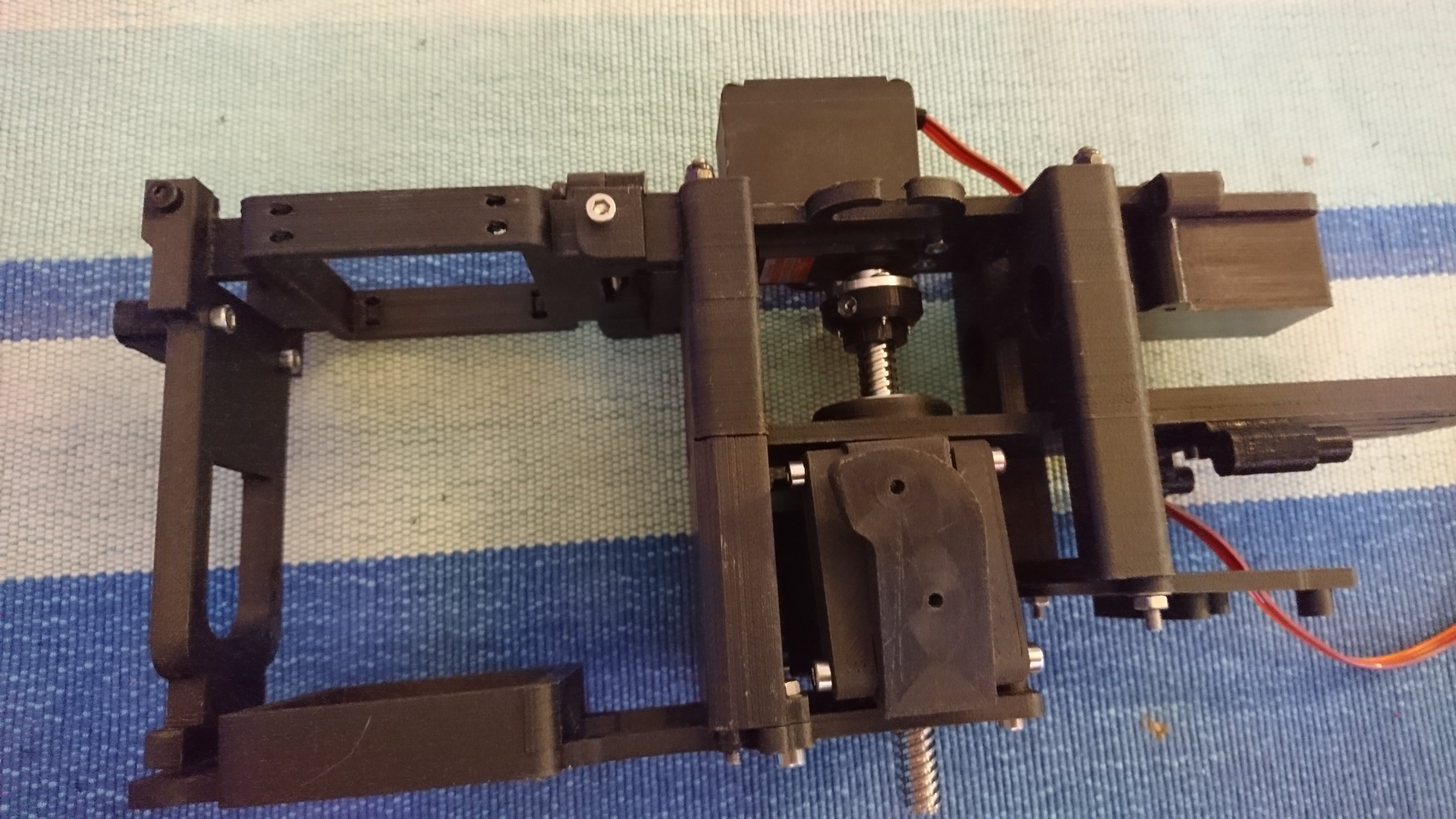
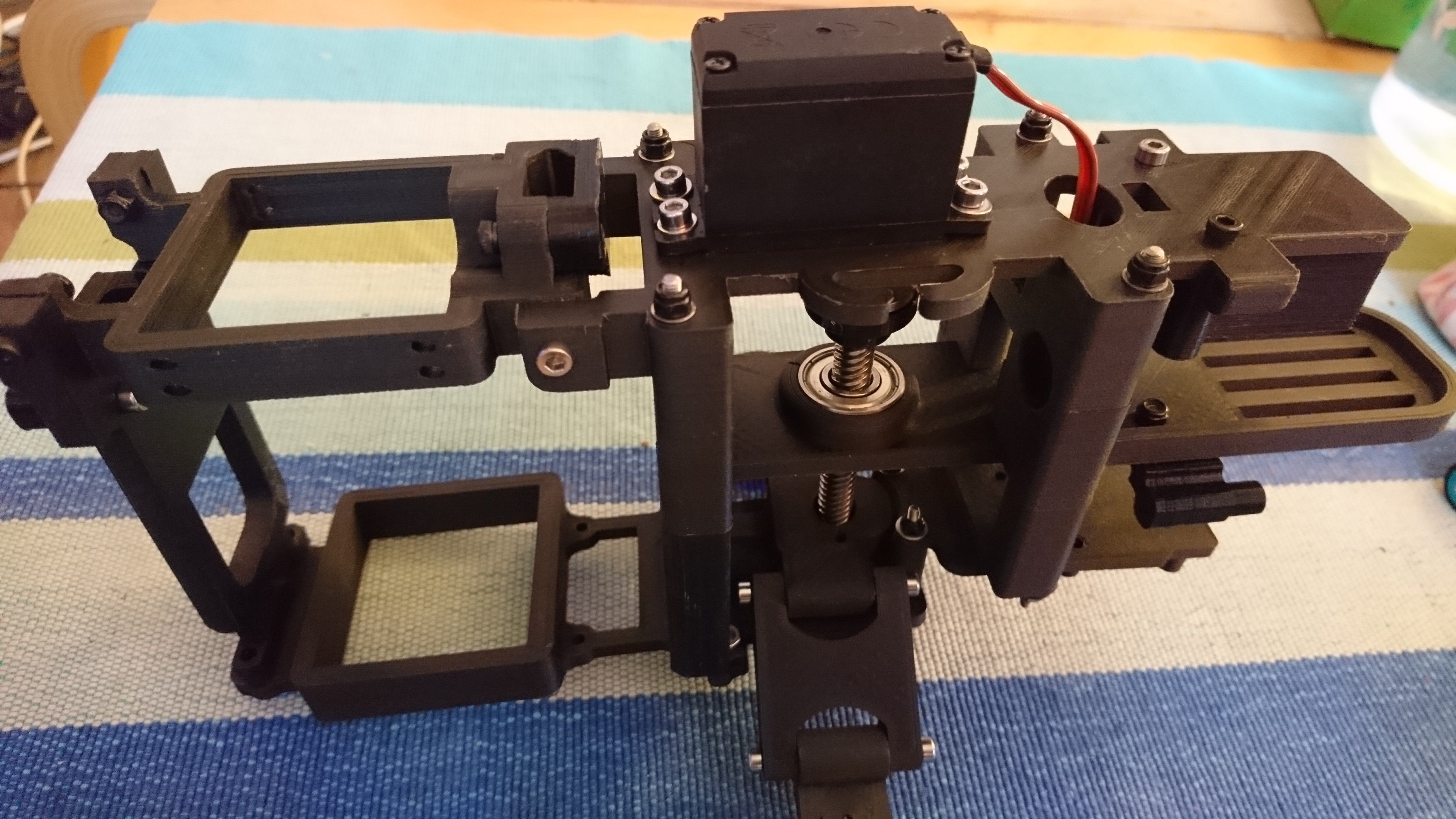
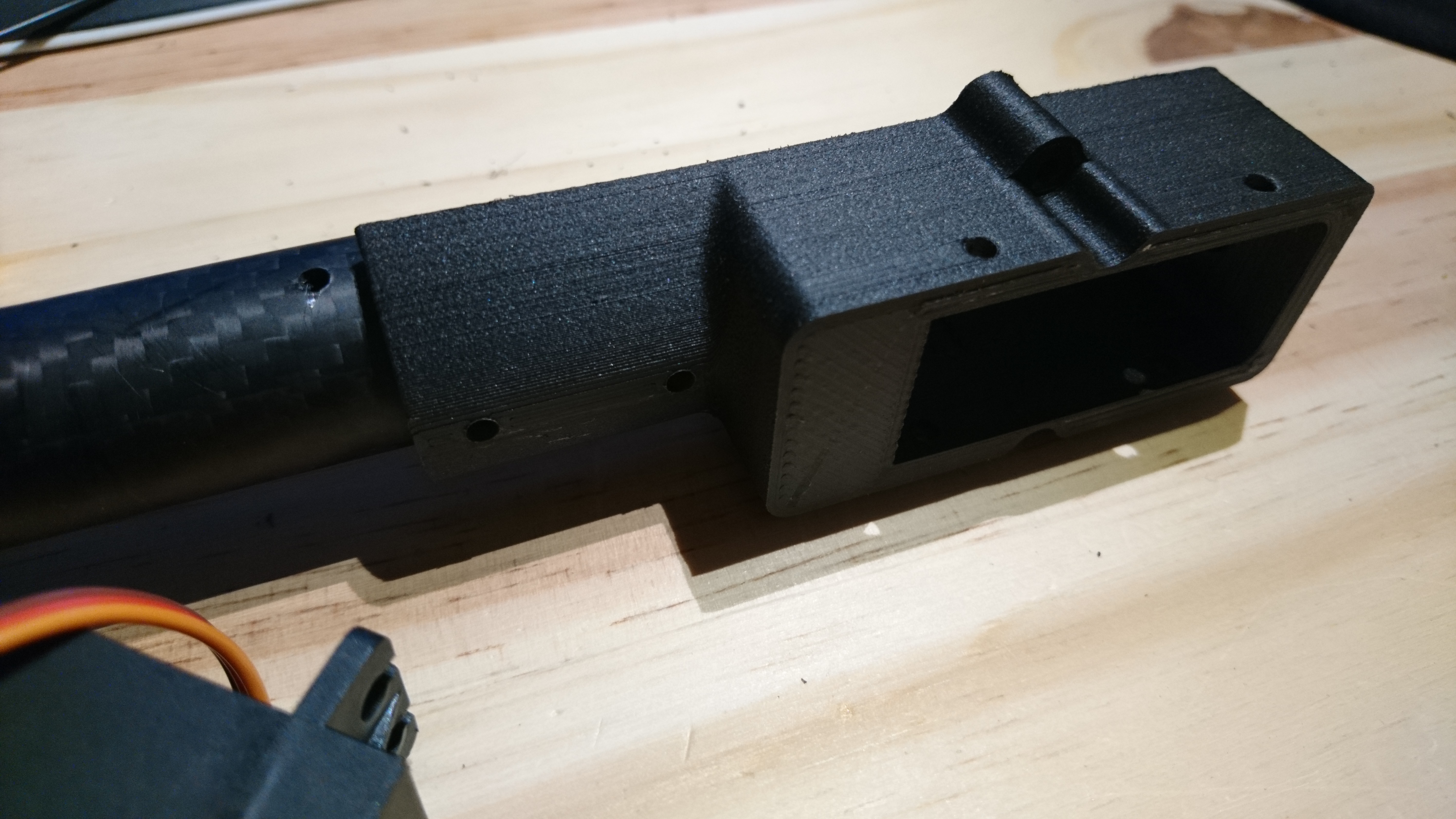
Voila le mécanisme de levage des bras de l’INSPIRED. Un simple système de vis sans fin.
Oui mais avec une vis de machine outil.
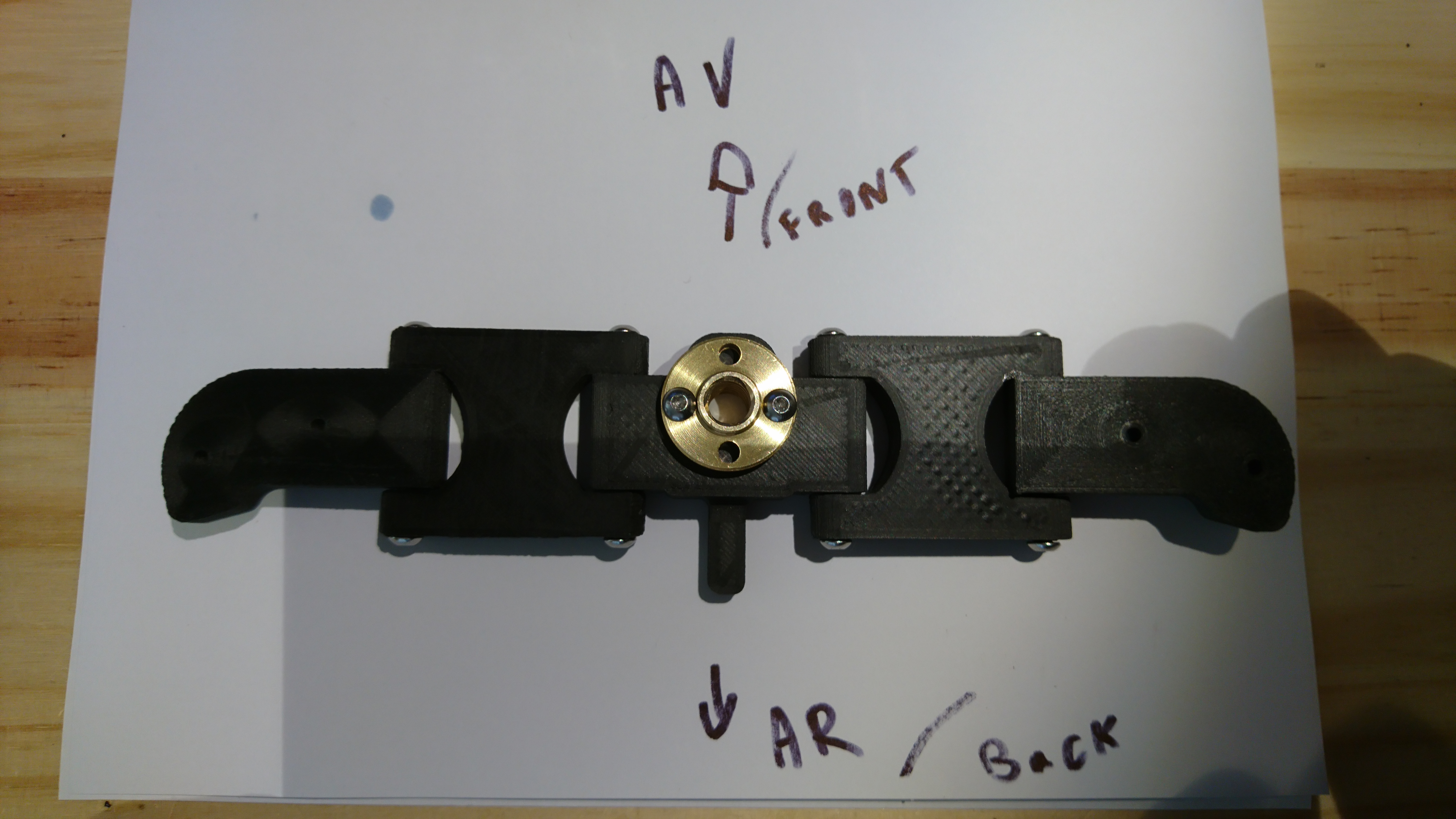
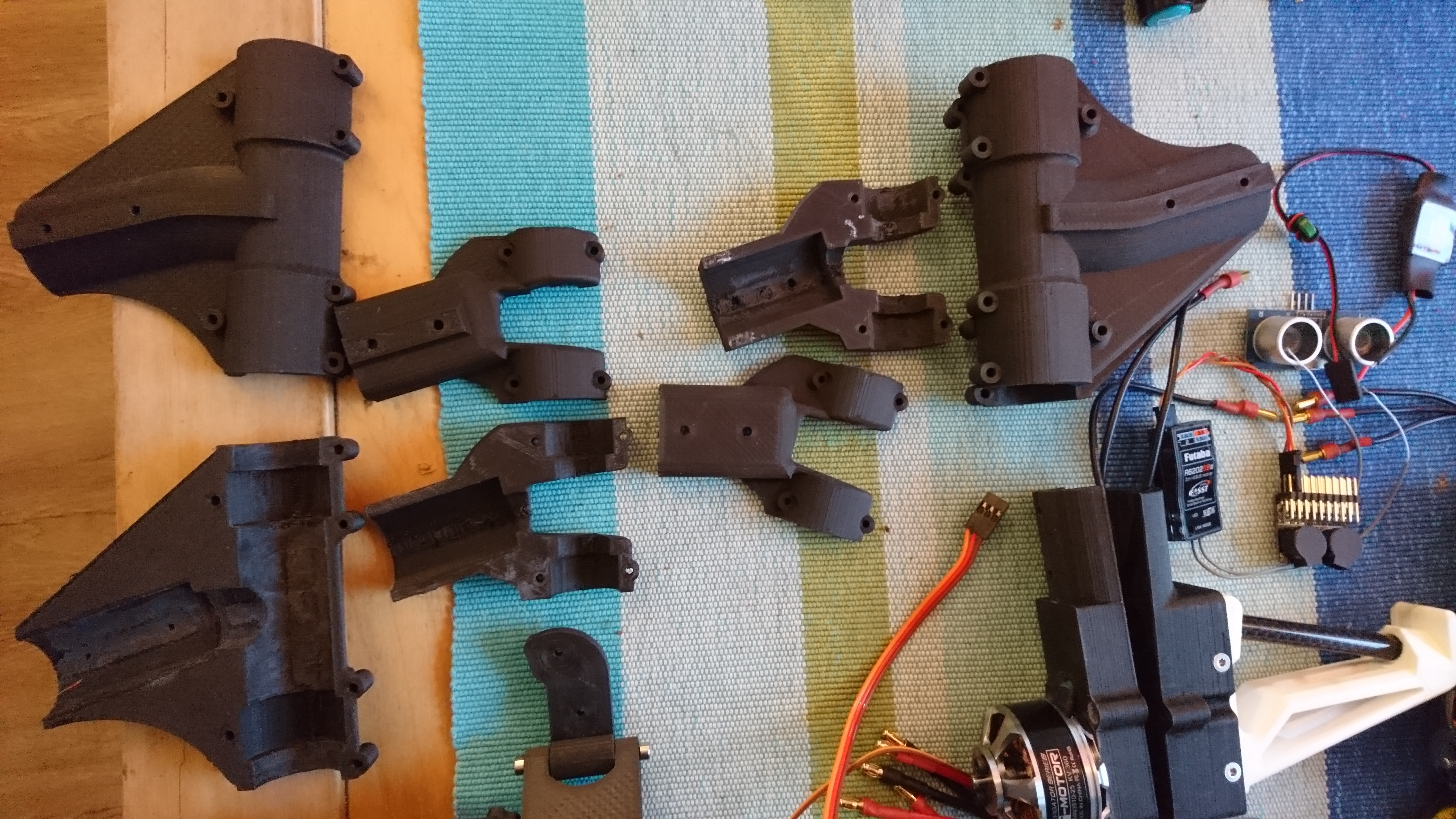
Le montage commence à blanc, presque toutes les pièces sont imprimées.
Il ne reste qu’à recevoir les bonnes vis et les roulements à aiguilles, à couper les tubes carbones à la bonne taille.


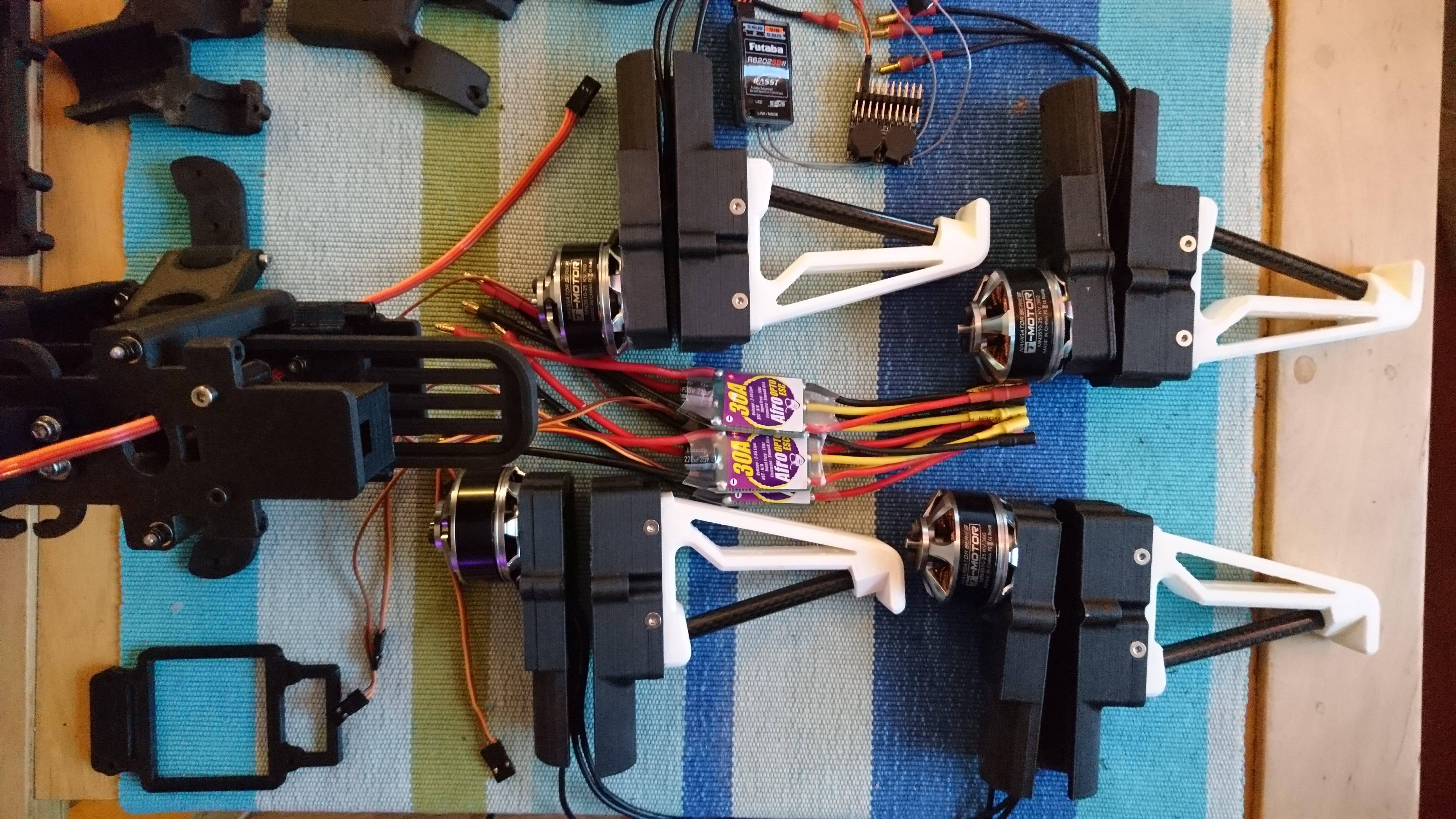
Voici la liste des matériels qui sera sur la machine Inspired.
Contrôleurs de vol: Pix4 ou Pixhawk ( ICI )
Motorisation: 4 x T- Motor MN3510-25 360KV ( ICI )
Esc: Afro ESC 30Amp OPTO Multi-rotor Motor Speed Controller (SimonK Firmware) ( ICI )
Hélices: 4 x RC timer 16x 5.5
Servo 360° pour le train, et un Arduino pour le contrôler.
La batterie d’accumulateurs sera en 4s, j’espere pouvoir monter les batteries 10A/h
Pour la coque:
http://www.studiosport.fr/lot-2-bras-renforts-lateraux-dji-inspire-1-p-5029.html
http://www.studiosport.fr/fuselage-superieur-dji-inspire-1-p-5000.html
http://www.studiosport.fr/fuselage-inferieur-dji-inspire-1-p-5001.html
http://www.studiosport.fr/nez-dji-inspire-1-p-5023.html
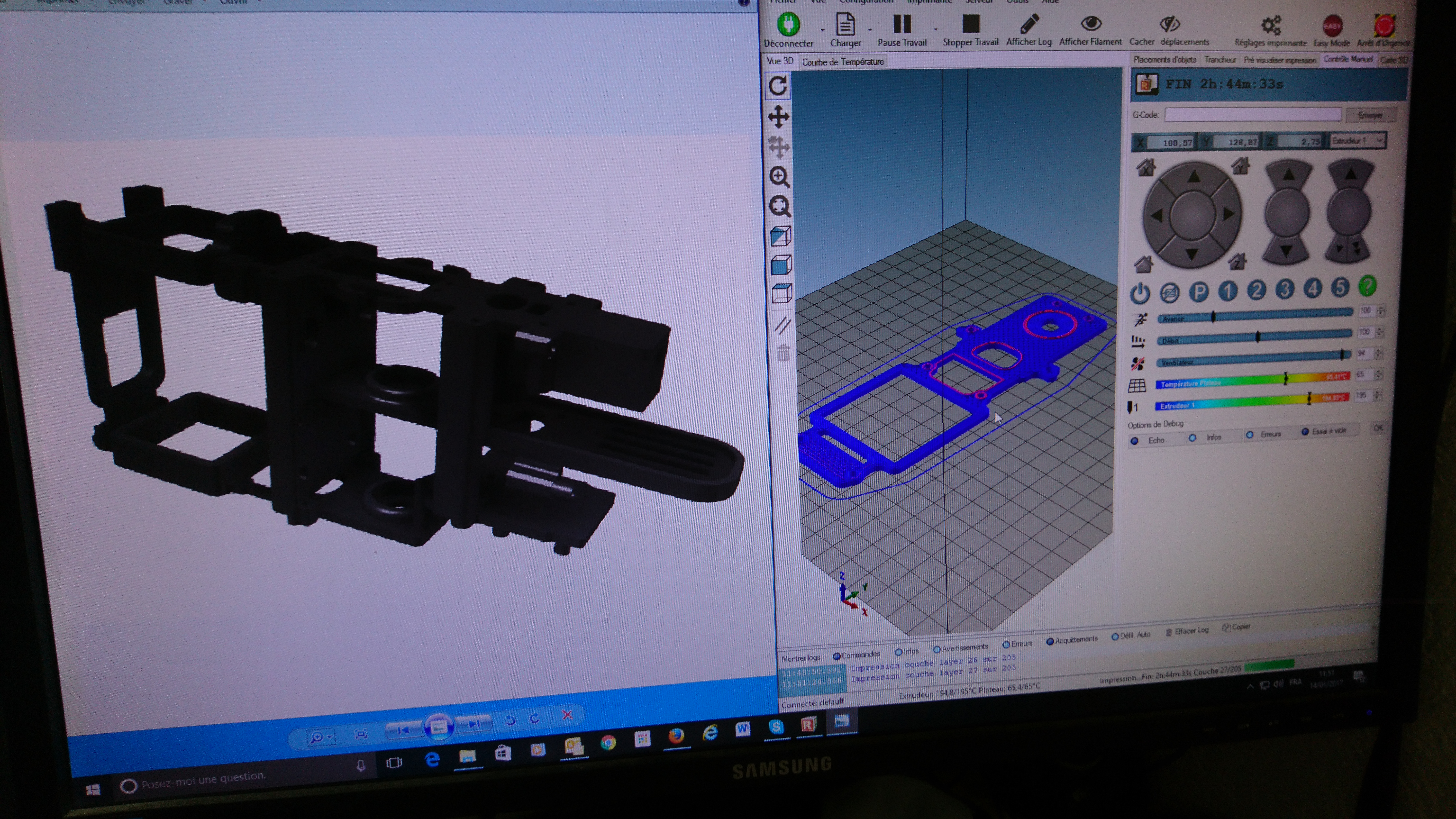
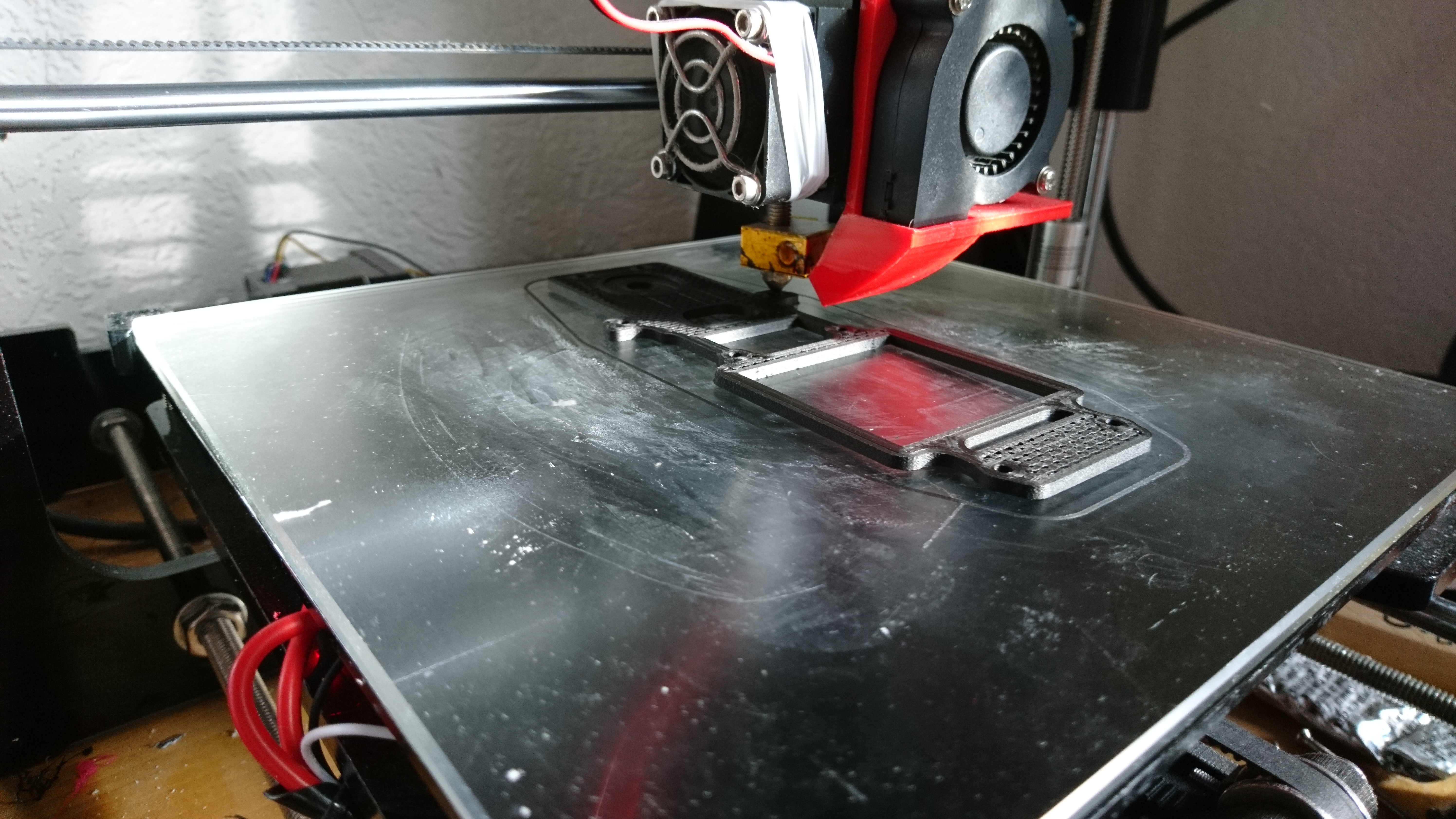
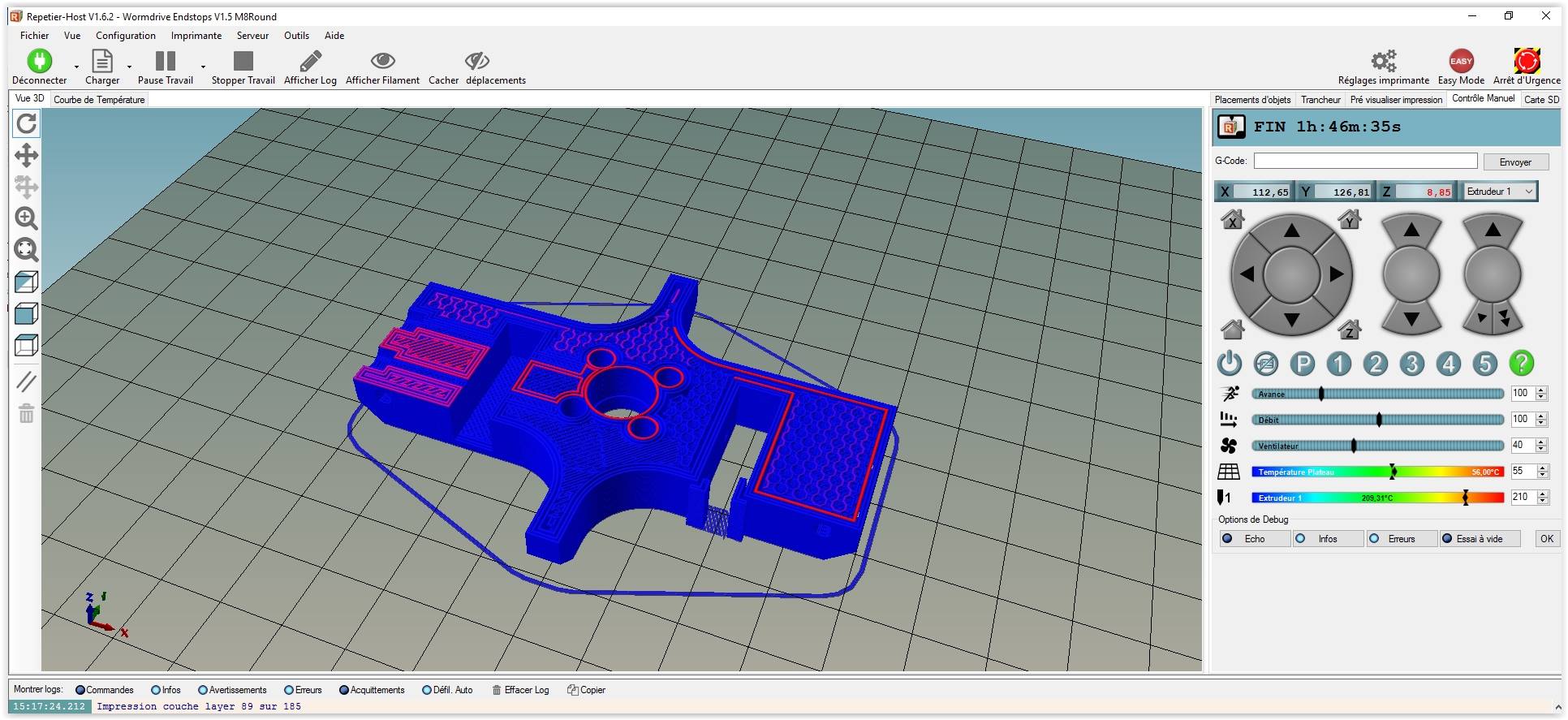
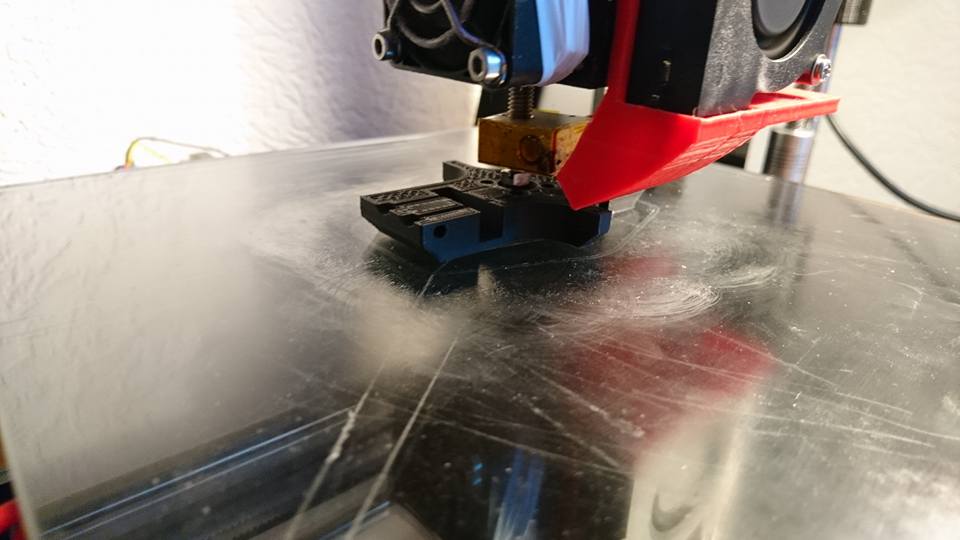
Je continue à imprimer , et c’est beau.
J’utilise du filament Proto-Pasta de chez ProtoPlant . C’est un PLA renforcé à 15% de fibre de carbone (Acheté ICI ).


Copier ce qui existe, oui et grâce à l’impression 3d tous devient possible.
Le Dji Insipre est une très belle machine mais d’un prix hors norme.
J’ai dans le bureau pas mal d’équipement me permettant (en théorie) de monter une belle grosse machine.
Des hélices de 15pouces, des moteurs qui vont avec, une Pixhawk que je teste et qui vole depuis quelques jours (enfin)… du tube carbone Diamètre 22mm.
Donc un mix de 2 projets Thingiverse devrait voir le jours cette année:
http://diyrc.co.uk/3d-printed-inspire-clone/ : ici la version 1.4 me plait bien enfin les pieds sont sympa, il reste juste le les support moteur a redesigner
Et me voila lancé dans l’impression de quelques pièces

@ suivre
Voici un site qui est intéressant:
Il permet de visualiser les zones de vole de nos machines et de connaitre les plafonds de vol…
Ce qui est en rouge est « interdit de vol »…
N’oublions pas, que pour entre en conformité avec la réglementation en vigueur et pouvoir voler avec nos multirotors sans demandes/déclarations administratives:
on doit être hors zone habitée, loin de personnes (ou d’animaux), sous les 150 m (500 pieds) et hors espaces aériens contrôlés, et voler à vu (oui malgré tous nous restons dans le monde du modélisme, donc les excursions de plusieurs kilomètre sont bien évidement anti sécuritaire, donc interdite) .
Le site ministériel: http://www.developpement-durable.gouv.fr/Drones-civils-loisir-aeromodelisme
Voila ce que l’etat diffuse : http://www.developpement-durable.gouv.fr/IMG/pdf/Drone-_Notice_securite-4.pdf
Perso j’en ai une copie dans ma valise radio, a usage des autorités et des badauds qui pensent que les medias leurs ont tous dit.
Enjoy
Je suis en court de paramétrage d’une carte Flip32 (copie des naze32), avec le soft cleanflight.
Je me suis heurté a un soucis d’utilisation du Sbus.
Il faut un » Sbus inverter » :
http://www.banggood.com/DALRC-NAZE32-Flight-Control-SBUS-Signal-Inverter-for-RC-Multicopter-p-1021118.html
Ou
http://www.hobbyking.com/hobbyking/store/__52185__FrSKY_SBUS_to_CPPM_Decoder.html
Après recherche et une bonne assistance d’une connaissance, voici ce qui en sort: